


















-
90
-
7.5.3 Operation Instruction Method of Program System
Select the program No. represented by the values of DI0, DI1 and DI2 and start the operation by selecting ST1.
Device
Symbol
Connector
pin No.
Functions/Applications
I/O
division
Positioning
mode
CP
CL
Point table No.
/Program No.
selection 1
DI0
CN1-5
<In point table method>
The point table No. and the home position
return mode are selected by DI0 to DI2.
<In program method>
The program No. is selected by DI0 to DI2.
DI-1
(Note)
Device
Selection description
Point table No.
/Program No.
selection 2
DI1
CN1-23
DI2 DI1 DI0
Program method
DI-1
0
0
0
Program No. 1
0
0
1
Program No. 2
0
1
0
Program No. 3
0
1
1
Program No. 4
1
0
0
Program No. 5
Point table No.
/Program No.
selection 3
DI2
1
0
1
Program No. 6
DI-1
1
1
0
Program No. 7
1
1
1
Program No. 8
Note. 0: off
1: on
Program
input 1
PI1
Turn PI1 on to resume the step stopped by
the SINK (1) command in the program.
DI-1
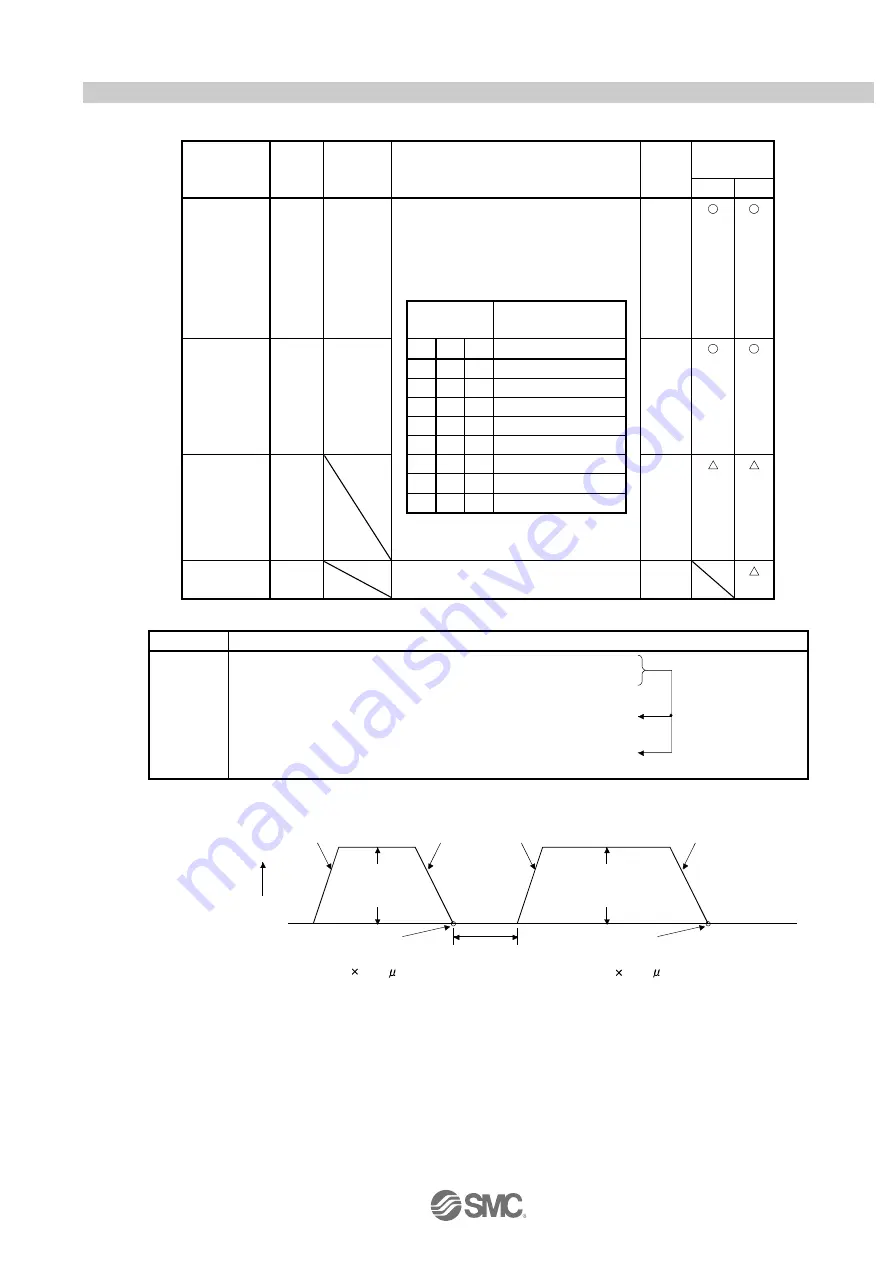
Program
Description
SPN (1000)
STA (200)
STB (300)
MOV (1000)
TIM (100)
MOV (2000)
STOP
Speed (Motor speed)
Acceleration time constant
Deceleration time constant
Absolute move command
Dwell command time
Absolute move command
Program end
1000[r/min]
200[ms]
300[ms]
1000[×10
STM
μm]
100[ms]
2000[×10
STM
μm]
a)
b)
c)
d)
e)
f)
0r/min
Servo motor
speed
d) Absolute
move command
(1000 10
STM
m)
e) Dwell command
time (100ms)
f) Absolute
move command
(2000 10
STM
m)
a) Servo motor
speed
(1000r/min)
b) Acceleration
time constant
(200ms)
b) Acceleration
time constant
(200ms)
c) Deceleration
time constant
(300ms)
c) Deceleration
time constant
(300ms)
a) Servo motor
speed
(1000r/min)
Forward
rotation







































































