





























7-30
FM 453 Servo Drive / Step Drive Positioning Module
C79000-G7076-C453-01
Step drive
Set the following machine data to initial values for the following optimiza-
tion steps:
S
Acceleration, delay
MD40 = MD41 = according to operating characteristic curve, see Section
7.3.2 “Procedure”
S
Jolt time
MD42 = 0
S
Positioning loop amplification
MD38 [1/min] = 1 000 = default value
S
Minimum standstill time, minimum traversing time
MD46 = MD47 = 100 ms
These parameters are less important in servo-controlled operation, be-
cause a gentle movement reversal already exists due to the time response
in the position control circuit. The values can usually be reduced by 1 ms
in the direction of the minimum values. (For a description of these param-
eters, see Section 7.3.8, “Optimization of dynamic response”)
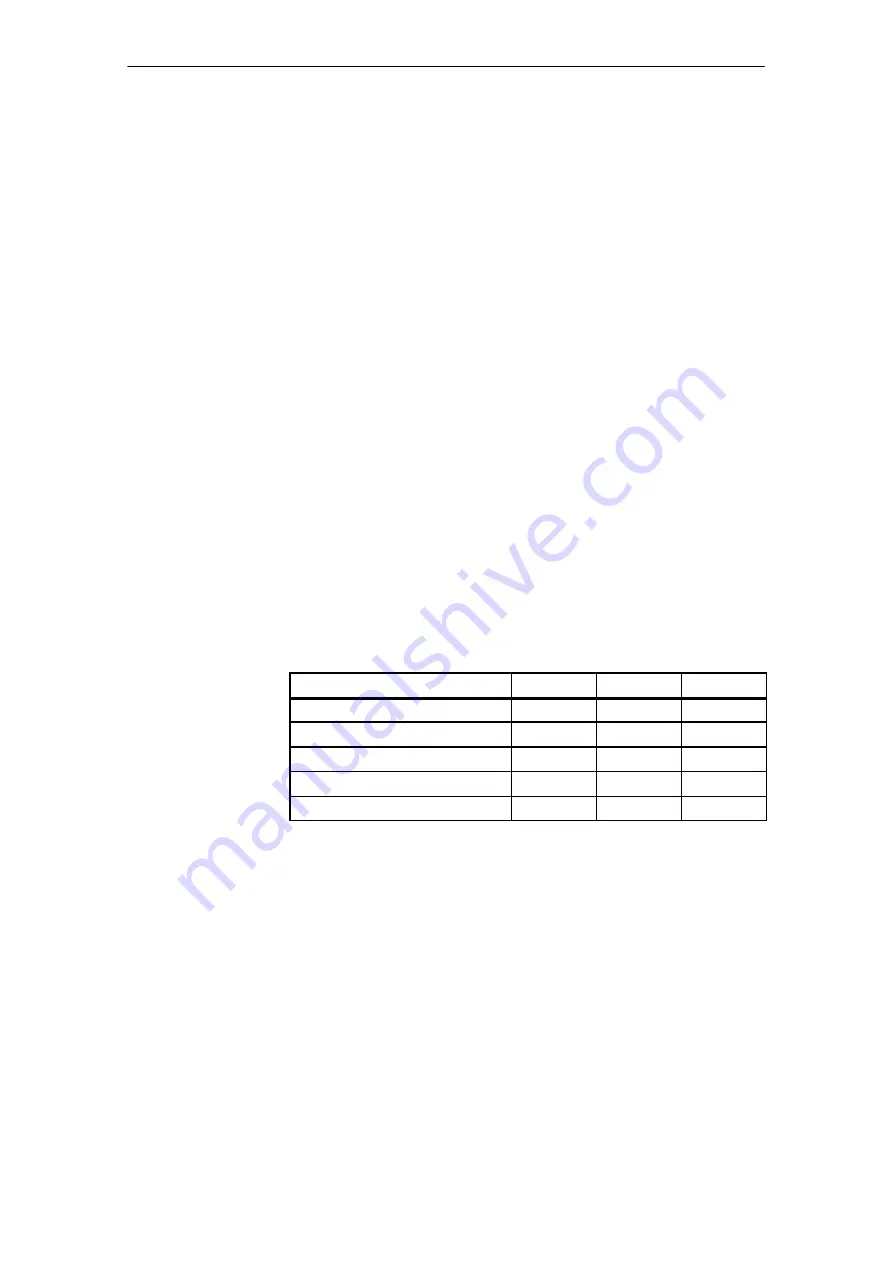
The qualitative effect of the parameters on the positioning procedure is illus-
trated by the following table:
Table 7-5
Effect of Machine Data that Defines Response in the Position Control
Circuit
MD38
MD40/41
MD42
Quiet running
small
–
–
Noise immunity
great
–
–
Soft movement reversal
small
great
great
Positioning without overshooting
small
great
great
Fast positioning
great
small
small
You can use the following startup actions to optimize position control to your
requirements if necessary. Check all speed ranges, and if applicable give the
greatest weight in evaluating the results to the speed that is the most signifi-
cant for your technology.
These startup actions are only possible for servo drives
(MD61 = 0) or step drives (MD61 = 1) when encoders are used.
Optimization of dy-
namic response
Starting up the FM 453
Summary of Contents for SIMATIC FM 453
Page 6: ...vi FM 453 Servo Drive Step Drive Positioning Module C79000 G7076 C453 01 Preface ...
Page 14: ...xiv FM 453 Servo Drive Step Drive Positioning Module C79000 G7076 C453 01 Table of Contents ...
Page 378: ...Index 6 FM 453 Servo Drive Step Drive Positioning Module C79000 G7076 C453 01 Index ...







































































