





























5
COMMISSIONING AND OPERATION
24
Operating Instructions | InspectorP Rack Fine Positioning
8024534 / 16UW / 2020-02-26
Subject to change without notice
NOTE
The optics are already pre-focused at a distance which is suitable for most
applications. An adjust of the focus position may be necessary in rare cases only.
In combined applications with single and double deep racks, always focus the
device on the double deep rack.
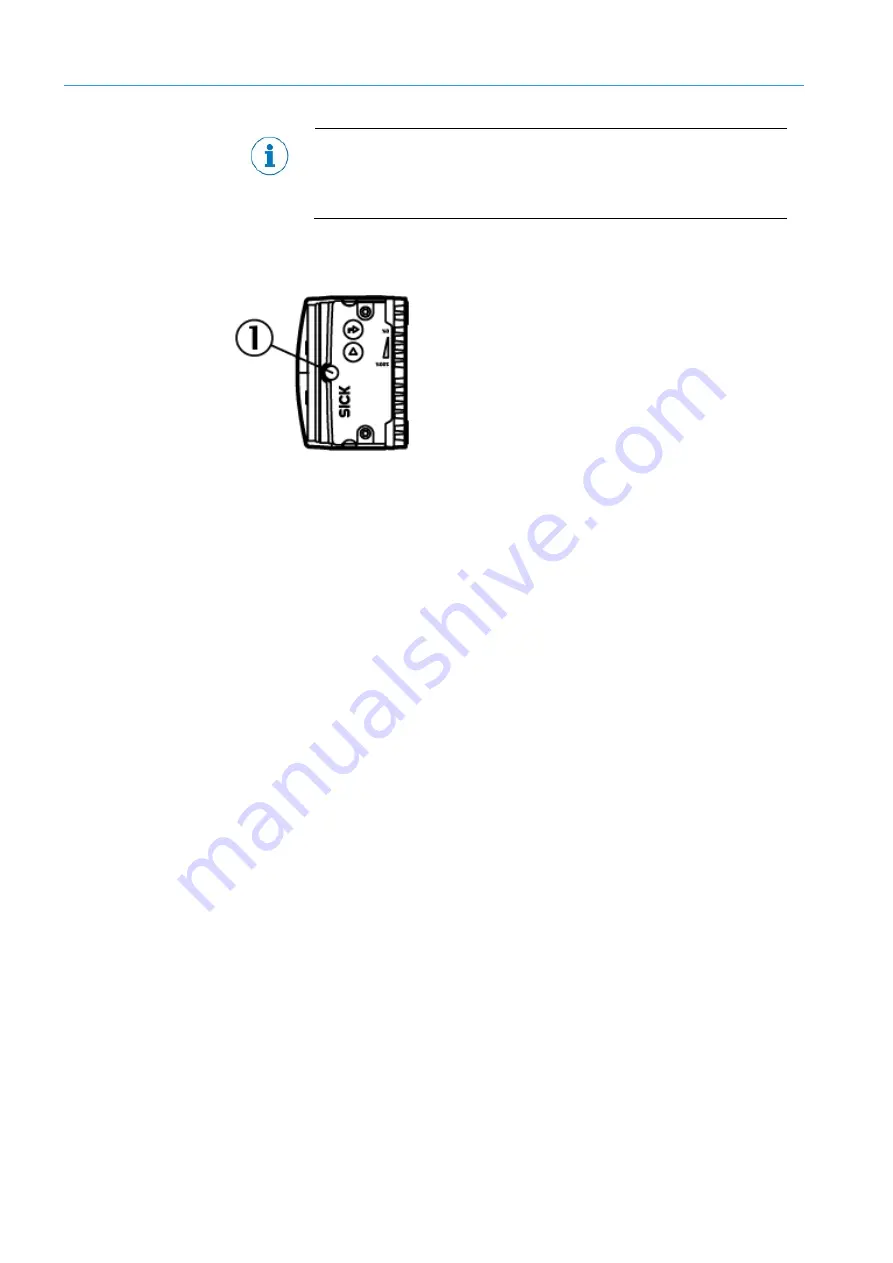
4.
Manually adjust the focus screws on the upper side of the device to optimize the
focus position. Use a SW2 hexagon key.
(1)
Manual focus screw
5.3.4
Calibration of the device
In order to receive exact position correction values from the device, the working
distance and the circle diameter of the positioning mark must be calibrated. First
calibrate for single deep applications.
Prerequisites
•
The
Operator
or
Maintenance
user level is set.
•
The
Continuous measurement
and
Display Image
switches are activated.
1.
Open the
Setup
window in SOPASair.
2.
Measure the distance between the viewing window of the device and the rack
with the positioning mark.
3.
Make the following calculation:
−
Measured distance between the viewing window and rack +40 mm =
calculated working distance
−
Example: 300 mm +40 mm = 340 mm
4.
Enter the calculated working distance in the
Working distance
area into the
Working distance – single deep [mm]
input mask.
With double deep applications,
enter the calculated working distance in the
Working distance – double deep
[mm]
input mask.
5.
Measure the circle diameter of the positioning mark.
6.
Enter the measured circle diameter into the
Circle diameter [mm]
input mask as
the start value in the
Circle Setup
area.
The device verifies the values and executes fine adjustment. The device
constantly records images and evaluates these images.
7.
In SOPASair, adjust the circle diameter in steps until the
Evaluation circle
diameter (aim: 100%)
parameter shows the value 100% ± 5% in the
Results
area
(target: 100%). The circle diameter set in SOPASair can deviate from the
measured circle diameter.
Figure 8: Manual focus screw