



























370
Manual – IPOSplus®
24
"Jog mode" sample program
Assembler – Examples
24.3.5 Program source code (with remarks)
NUMERATOR: 1 DENOMINATOR: 1 UNIT: Inc
******************************************
Sample program: Jog mode
File: Tipp.mdx
Author: SEW/AWT
Date: 01.06.98
Function: Jog mode
- endless travel possible
- No need to reference the axis
- Travel limits are observed; software LS
- Travel speeds/ramps from H310
- Inputs jog+ (DI14)/jog- (DI15)
Parameter setting (P600) of inputs/outputs:
In inverter commas = specified function
without inverted commas = IPOS INPUT/OUTPUT
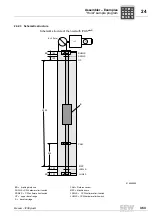
Terminal wiring of inputs:----------------
DI00 "Controller inhibit"
DI01 "Enable"
DI02 "Error reset" (move LS clear)
DI04 "Reference cam"
DI03 "CW limit switch"
DI05 "CCW limit switch"
DI14 Jog CW
DI14 Jog CCW
DI16 Start reference travel
DI17 (Start positioning)
Terminal wiring of outputs----------------
DB00 Brake
DO01 Ready signal
DO16 "IPOS in position"
DO17 "IPOS reference"
Variables used:---------------------
H310 = V-jog CW (1/10 rpm)
H311 = "CCW"
H312 = acceleration ramp (ms)
H313 = deceleration ramp (ms)
H316 - H319 = jog auxiliary variable
******************************************
------------------------------------------
Comment
Program start
==========================================
Initialization
------------------------------------------
SET H310 = 5000
SET H311 = 5000
SET H312 = 2000
SET H313 = 2000
------------------------------------------
Set velocity and acceleration values for jog mode (see
remark)
P
i
f
kVA
Hz
n
P
i
f
kVA
Hz
n