





























50
Manual – XFE24A EtherCAT Fieldbus Interface
7
Example: TwinCAT
Motion Control via EtherCAT
Encoder
configuration
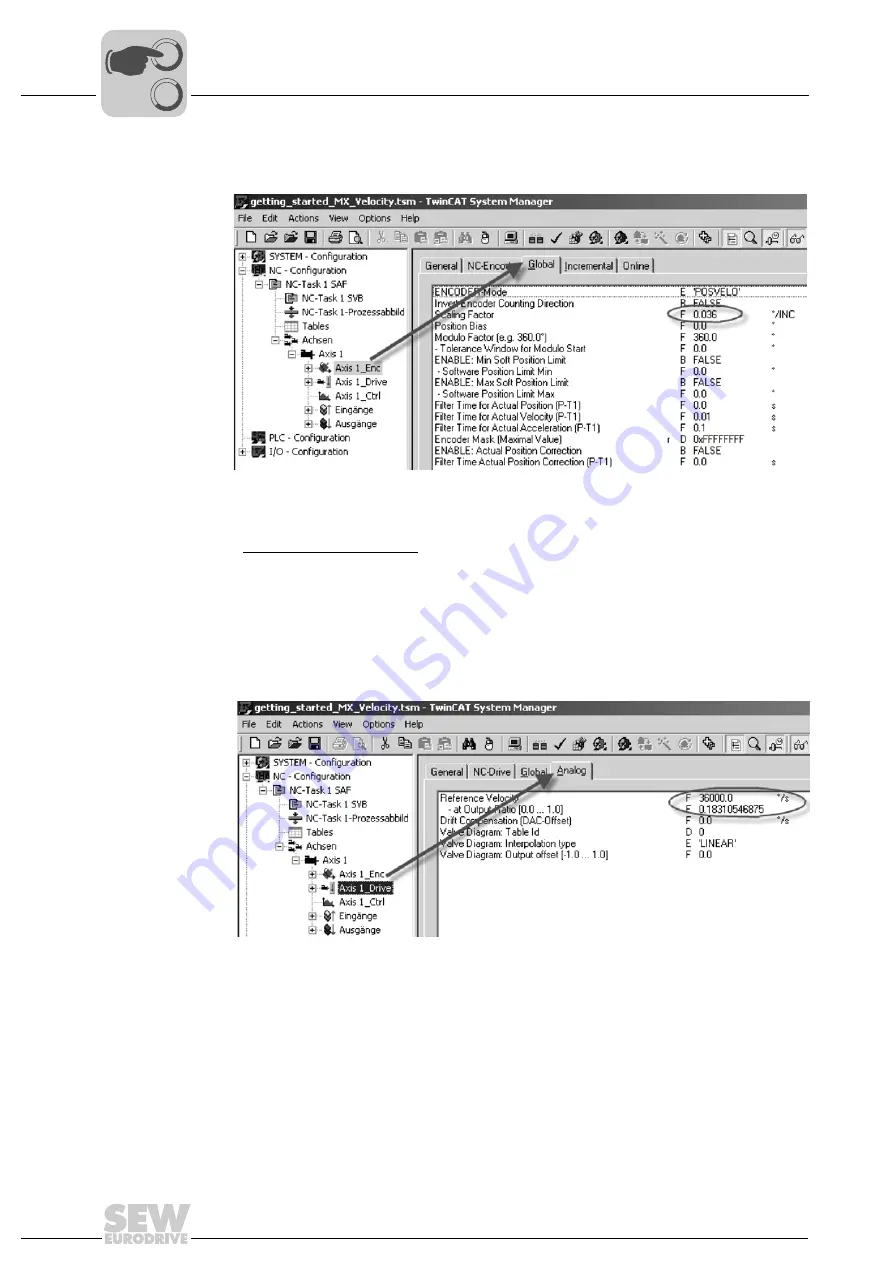
The CANopen DS402" is specified as encoder (under "Axis x_Enc") and configured as
follows (
→
following figure).
The scaling factor results from the following formula:
7.3.1
Velocity mode
In Velocity mode, "Drive connected to KLXXX..." is selected (under "Axis x_Drive").
Enter the following values in the "Analog" tab page (
→
following figure):
MOVIAXIS
®
factory settings for speed:
The setpoint speed ("Reference Velocity") = (maximum motor speed)
×
6 is given with
the conversion factor "at Output Ratio [0.0 ... 1.0]" = (maximum motor speed) / 2
15
, de-
pending on the scaling factor in MOVIAXIS
®
.
MOVIAXIS
®
user travel units and scaling factors that deviate from the factory setting
must be adjusted accordingly using the conversions and factors stated above.
11716AEN
360°
2
16
·
·
PositionNumerator
Inc PositionDenominator
11717AXX
0
0
I
Summary of Contents for 1821 2492
Page 2: ...SEW EURODRIVE Driving the world...
Page 66: ......