





















Introduction to the Trekker PT
Trekker PT
Page 2
4. Introduction to the Trekker PT
The principle of self balancing scooter is based on the basic principle of "dynamic stability", which is
the automatic balancing ability of the scooter itself. The posture of the rider and the scooter is
determined by the built-in precision gyroscope, through the precision and accuracy of the central
microprocessor. This calculates the appropriate command to drive the motor to achieve the
balancing effect. As Trekker PT is a new type of personal transporter, it is difficult to define the type
of the traditional classification; some think of the Trekker PT as a wheeled version of the unicycle,
others think it is a kind of dynamic scooter. However, it is different from the traditional uni-axial
wheel or bi-axial wheel scooter, and in some formal occasions (such as the official rules of the road),
the Trekker PT scooter should be called 'an electric personal mobility device', commonly known as an
electric scooter.
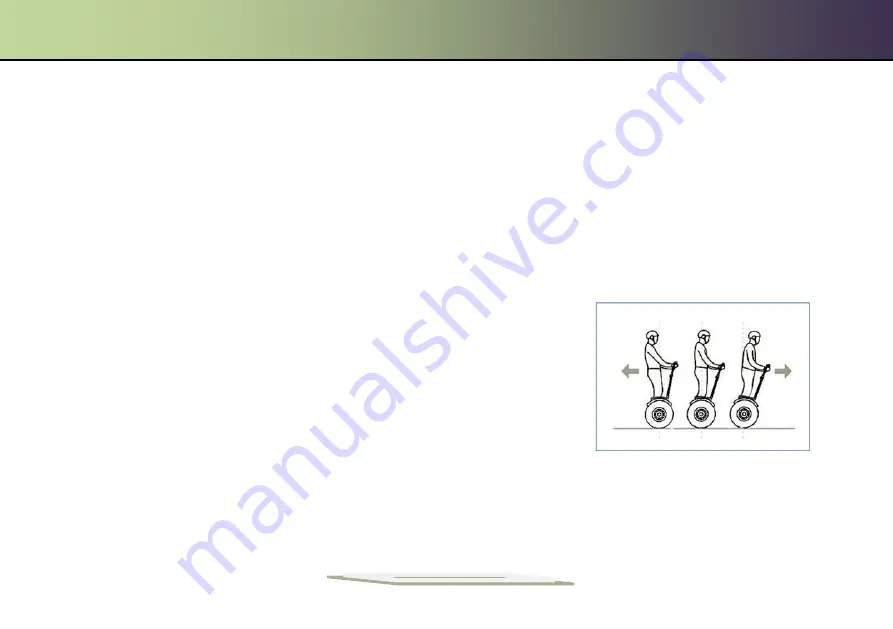
The Trekker PT has two wheels, the width of the ordinary adult
shoulder width, and weighs approximately 43kg. It is powered by 2
lithium ion batteries. When riding, it does not need brakes or a
throttle lever; when the rider leans forward, the scooter goes forward
and when the rider's body stands straight - it stops.
The Trekker PT uses the principle of dynamic balance, when the body
moves, the center of gravity of the body action will change
continuously to achieve the correct balance. With wheels instead of the feet, it replaces the high
precision balance of the human being, is low-cost to run, eco-friendly, quiet and convenient. Having
been fully charged, the Trekker PT can run for up to 60Km, depending on weight of rider and the local
terrain.