





























Appendix
Interconnect Diagrams
314
MagneMotion
Rockwell Automation Publication MMI-UM007F-EN-P - September 2020
Interconnect Diagrams
This appendix provides wiring examples and system block diagrams for the QuickStick HT
transport system when using the QSHT 5700 inverter and the Kinetix
®
2198-Pxxx DC-bus
Power Supply.
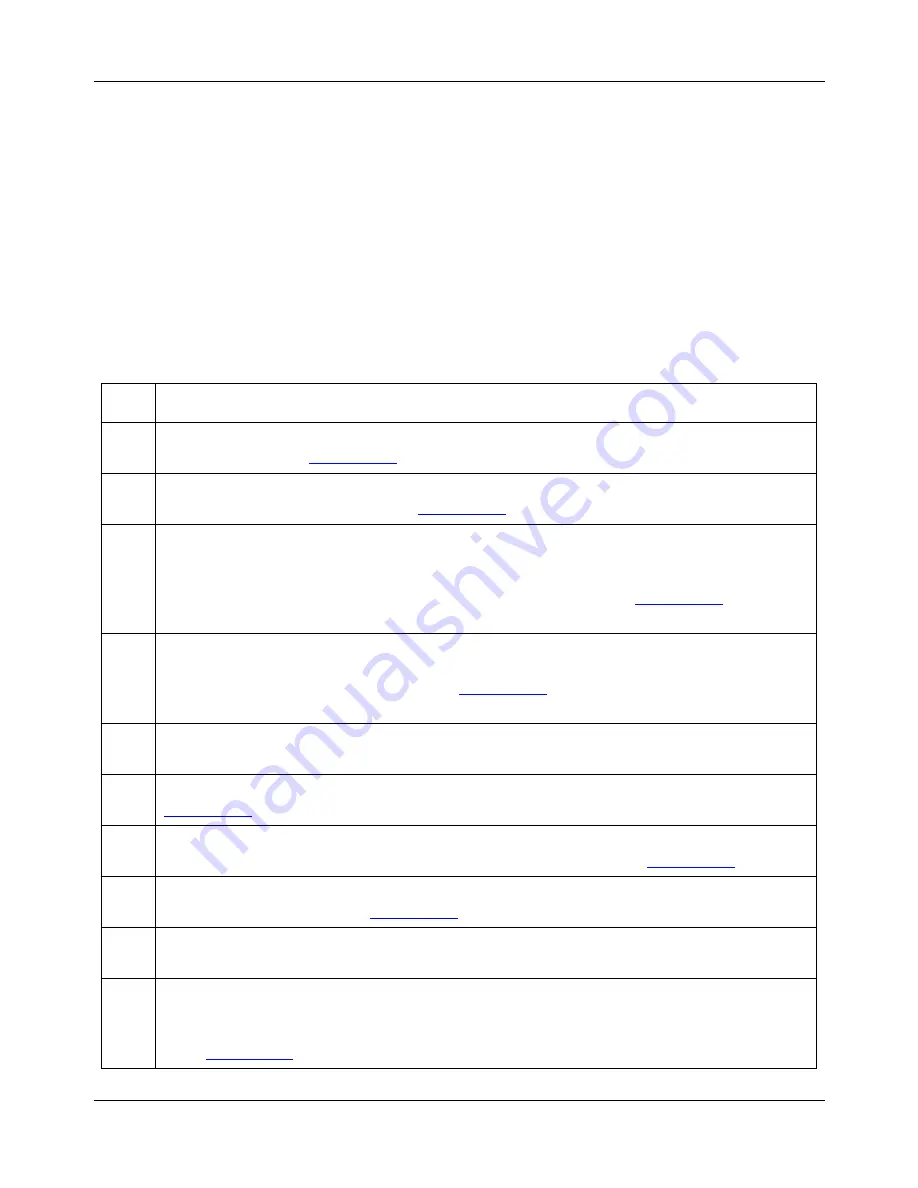
Interconnect Diagram Notes
This appendix provides wiring examples to assist in wiring the QSHT 5700 drive system.
These notes apply to the wiring examples on the following pages.
Table A-1: Interconnect Diagram Notes
Note
Information
1
For power wiring specifications, see Wiring Requirements in the
Kinetix Servo Drives Specifica-
tions Technical Data
.
2
For input fuse and circuit breaker sizes, see Circuit Breaker/Fuse Selection in the
Kinetix Servo
Drives Specifications Technical Data
,
3
An AC (EMC) line filter is required for CE compliance. Place the line filter as close to the drive
as possible and do not route very dirty wires in wireway. If routing in wireway is unavoidable, use
shielded cable with shields that are grounded to the drive chassis and filter case. For AC line filter
specifications, see
Kinetix Servo Drives Specifications Technical Data
.
2198-DBR
xx
-F line filters are preferred.
4
Cable shield clamp with clamp spacers must be used to meet CE requirements with Bulletin 2090
power cables 2 AWG and smaller. See Customer-supplied Motor Power Cables in the
Kinetix
Servo Drives Specifications Technical Data
, to meet CE when wiring
2198-S263-ERS
x
and 2198-S312-ERS
x
drives with power cables larger than 2 AWG.
5
QSHT 5700 inverters include separate digital inputs, DSL feedback, universal feedback, motor
power, and motor brake wiring plugs for each axis.
6
See Digital Inputs Connector Pinouts in the
Kinetix Servo Drives Specifications Technical Data
,
, for digital input configurable functions and default settings.
7
PE ground connection bonded to the panel must be used to meet CE requirements. See Ground the
Drive System in the
Kinetix Servo Drives Specifications Technical Data
,
8
For M1 contactor selection and specifications, see Contactor Selection in the
Kinetix Servo Drives
Specifications Technical Data
,
9
Internal shunt wired to the RC connector is default configuration. Remove internal shunt wires to
attach external shunt wires.
10
Default configuration for ground screws or jumper is for grounded power at customer site. For
impedance-grounded power configurations, remove the screws/jumper. See Input Power Configu-
rations for Kinetix 5700 Power Supplies in the
Kinetix Servo Drives Specifications Technical
Data
,
for more information.