FT 300-SForce Torque Sensor - Instruction Manual
42
Caution
The recommended threshold represents the smallest variations that can be detected by the sensor.
The signal noise is the limiting factor for the Sensor's precision.For the FT 300- S, the signal noise defined in the signal
specifications is the standard deviation of each data (Fx, Fy, Fz, Mx, My, Mz) over 1 second. In order to use that signal noise
information, three times the standard deviation given must be used. According to the normal distribution, three times the standard
deviation will cover almost all values possible (99.7%).
Info
Noise is an unwanted and unpredictable alteration to a signal. It may come from electrical or electromagnetic sources
and degrades the quality of the Sensor's signal.
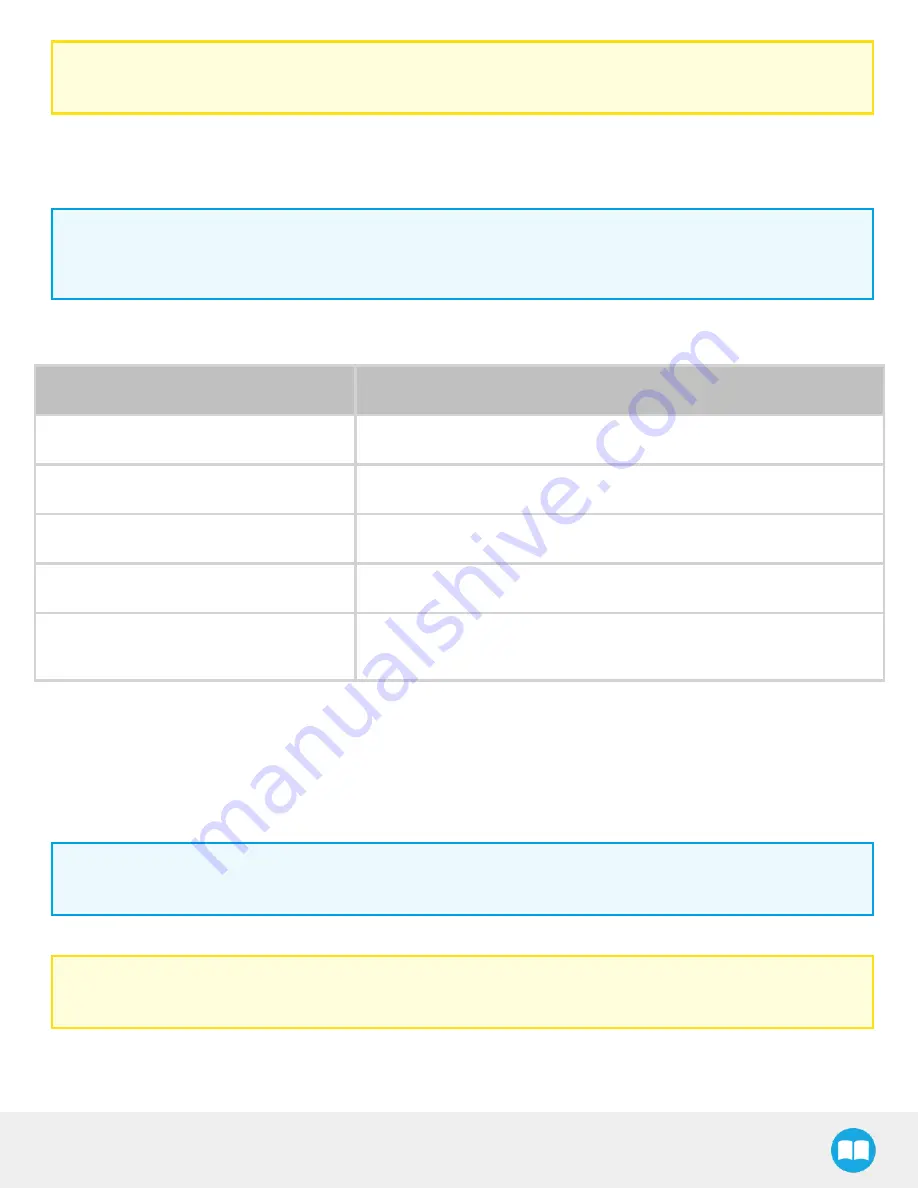
5.4. Electrical Ratings
SPECIFICATION
VALUE
Input voltage
5 to 24 V DC ± 10%
Max power consumption
2 W
Communication electrical interface
RS-485
Recommended fuse
Phoenix #0916604 (UT6-TMC M 1 A)
Recommended power supply
TDK-Lambda DPP Series 15W Single Output DIN Rail Mount Power Supply,
DPP15-24
5.5. Couplings
For a detailed list of available couplings and adapter plates, please refer to the Spare Parts, Kits and Accessories section.
The figure below represents the coupling for the FT 300-SSensor on the robot:
Info
All Robotiq couplings and adapter plates are provided with necessary hardware for fixation on the Robotiq device side.
Caution
Unless identified for specific packages only, robot side screws and dowel pins are not provided.