





























FT 300-SForce Torque Sensor - Instruction Manual
29
Adapt to a User Application
In practice, the provided source code will be adapted to either: be incorporated with a custom application or to communicate with
one. At this point, the main.c file should be adapted according to the suggested comments inserted in the code.
Caution
Please note that Robotiq can only support our customers in making sure they can compile and test the provided code as
is.
No support can be provided for the integration of the provided source code into a custom application.
4.3. Visual Demo Software
The Visual Demo Software is used to demonstrate the ability of the FT Sensor to read force and moment. It is not intended to be
used for programming or to save or use data. It can also be used to calibrate the Sensor. Please refer to the Installation section for
the calibration procedure.
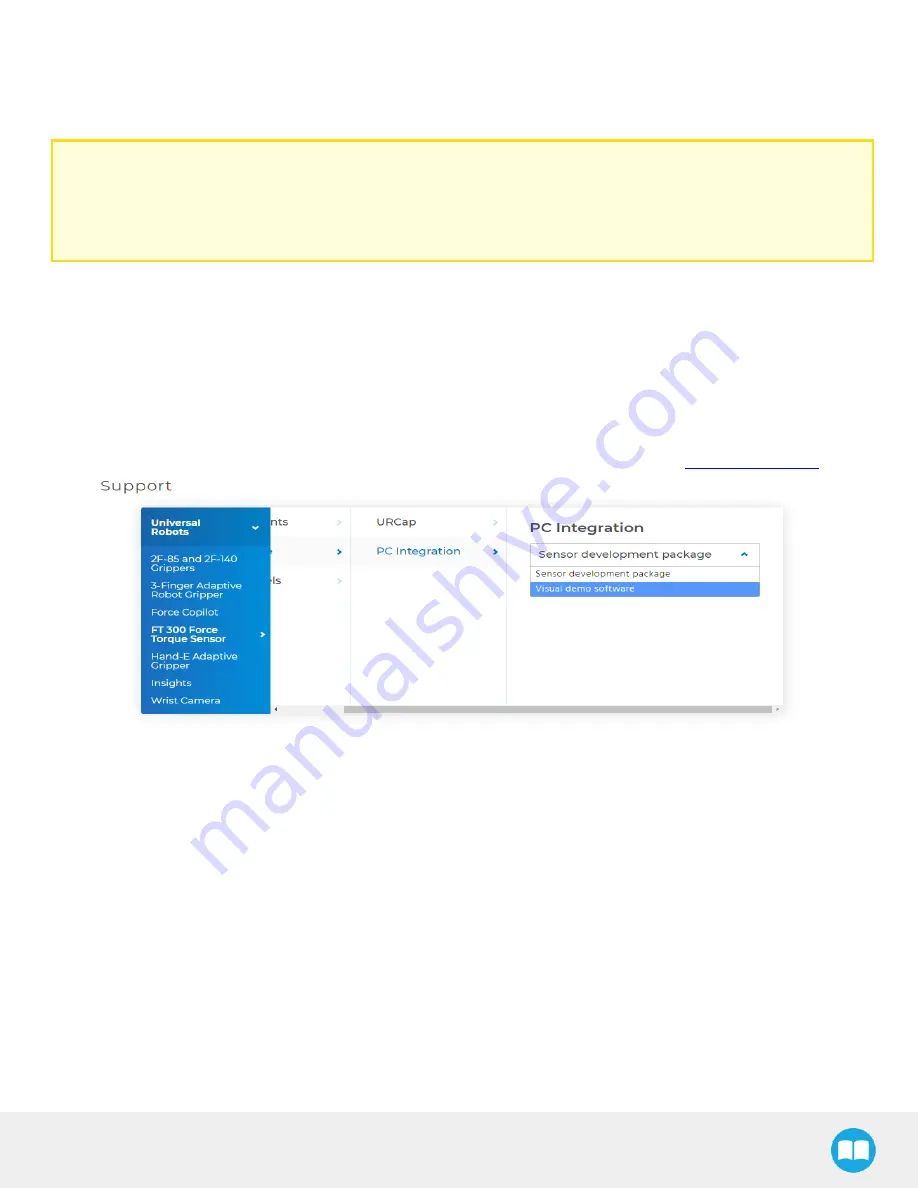
4.3.1. Software Package Installation
1
Make sure that you have the latest version of the Visual Demo Software, which can be found at
.
2
Copy all the files of this folder onto a PC.
3
Connect the USB connector to the converter attached to the PC. Important : The Sensor must NOT be powered at this time.
4
Wait while the driver(s) install. After all the drivers have been installed.
5
Plug the Sensor cable into the Sensor.
6
Connect the Sensor cable to the power supply.