





























SYSTEM PING RATES
SeaBat 8160
Operator‟s Manual
Page 49
October 6, 2011
Version 5
APPENDIX B SYSTEM PING RATES
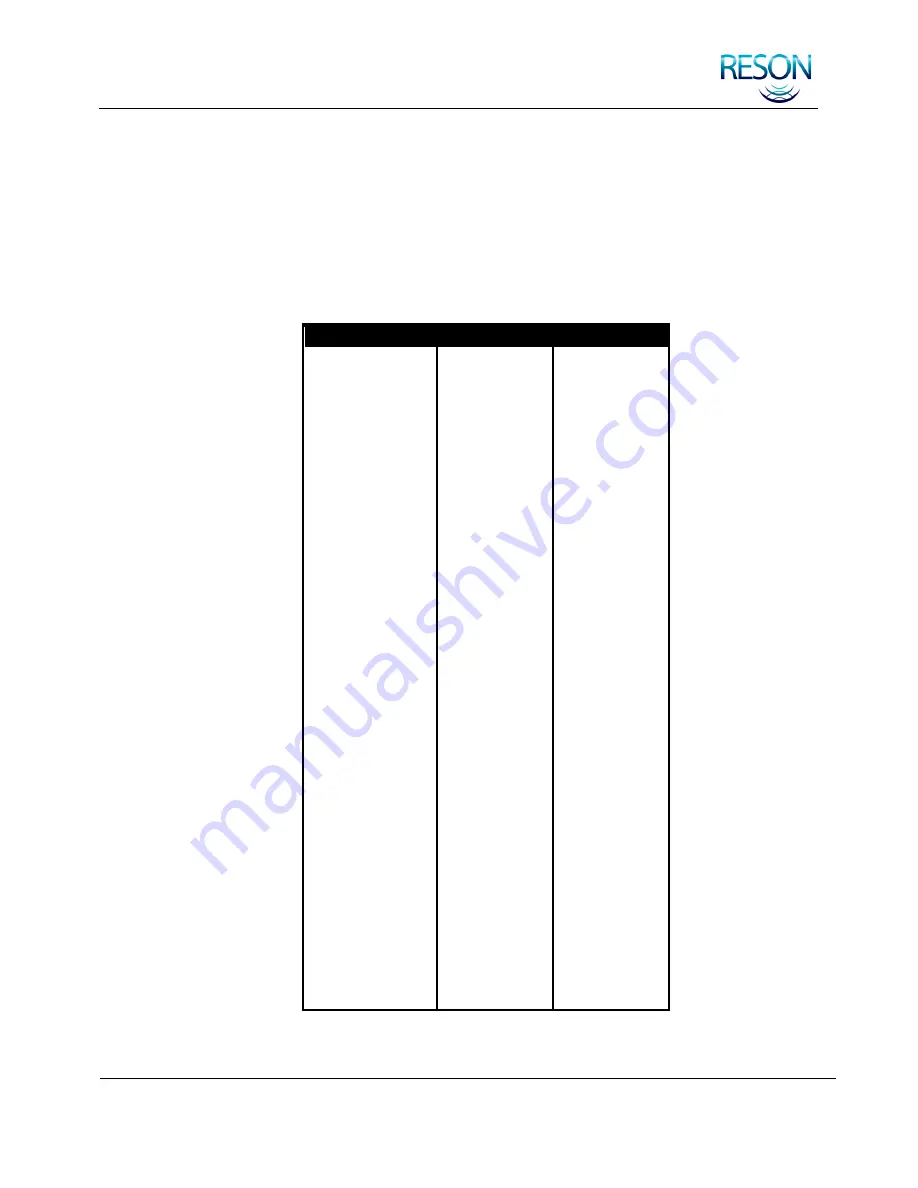
To aid in the calculation of sounding density, the following table provides ping
rates for the SeaBat 8160 system. Sound Velocity = 1500 meters/sec,
HeadSync = 1, MaxRate = 15 pings/sec. (Snippets mode reduces the ping rate
on some range scales.)
Table 6: System Ping Rate Values
Range Scale
Ping Rate
1
Ping Rate
2
5
14.94
14.94
7
14.94
14.94
10
14.94
14.94
15
14.94
14.94
20
14.94
14.94
25
14.94
14.94
30
14.94
14.94
35
14.94
14.94
40
14.94
13.26
50
12.88
10.84
75
8.84
7.41
100
6.73
5.62
125
5.44
4.53
150
4.56
3.81
175
3.92
3.27
200
3.44
2.87
250
2.77
2.31
300
2.31
1.93
350
1.99
1.65
400
1.74
1.45
500
1.40
1.16
750
0.935
0.777
1000
0.703
0.584
1250
0.563
0.467
1500
0.469
0.390
1750
0.402
0.334
2000
0.352
0.292
2500
0.282
0.234
3000
0.235
0.195
3500
0.201
0.167
4000
0.176
0.146
5000
0.141
0.117
Ping Rate
1
:
Snippets = OFF or UNIFORM
Ping Rate
2
:
Snippets = FLAT BOTTOM