

























生活美好,臂不可少
http://www.realman-robotics.com
108
the input or output interface by the actual needs.
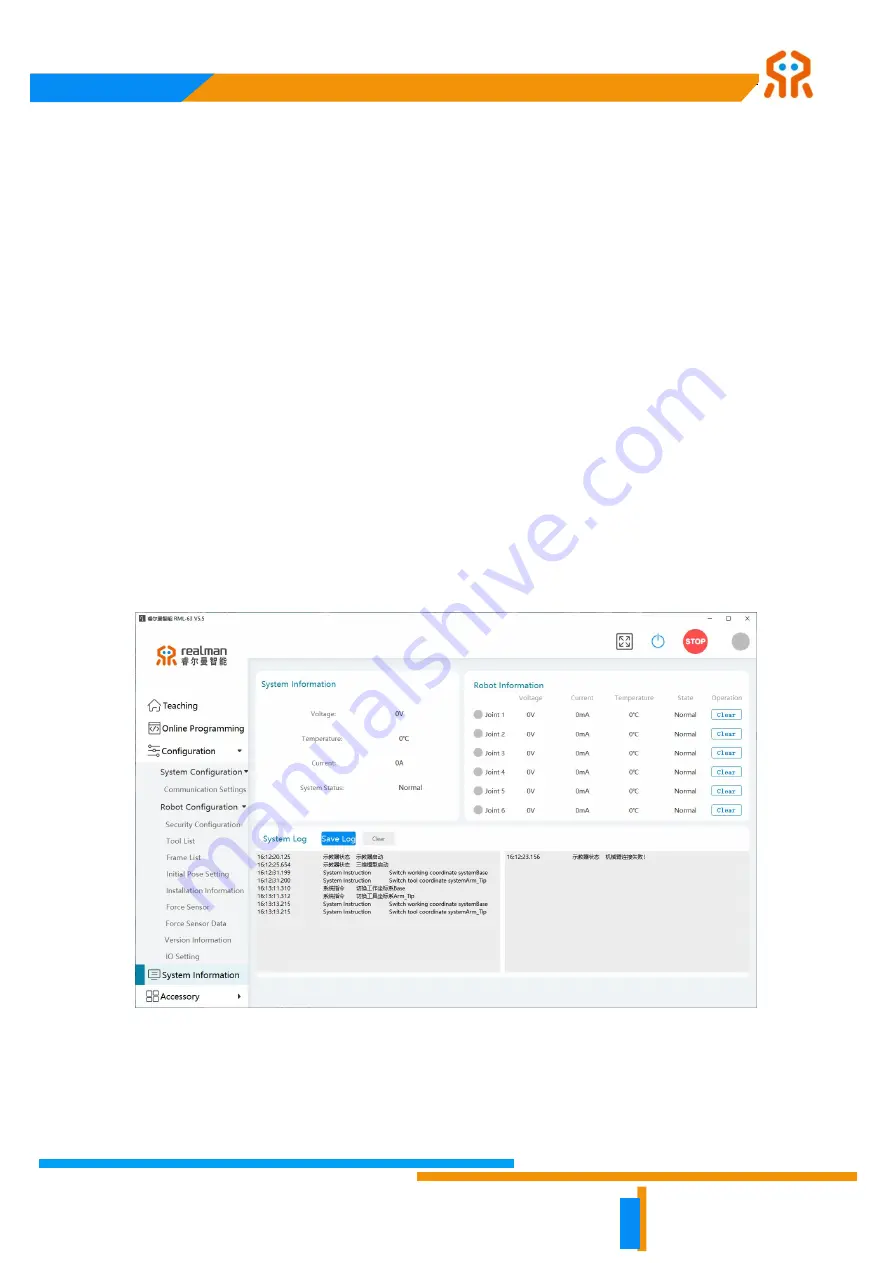
8.5 System Information
System information includes controller status and joint status, as well as system logs.
System information: including controller input voltage, output current, temperature,
pose and error code.
Robot arm information: including voltage, current, temperature, enabling status and
error code of all 6 joints. When the joint error is eliminated, click the “Clear” button
to clear the error code before the joint movement can be controlled.
System log: contains all the operation instructions of the teach pendant software and
the error types of the robot and controller, and it is displayed in the text box with time
stamps. At the same time, you can also save the log information to the specified
location through the “Save” button. When the “Clear” button is clicked, all displayed
system logs are cleared.
System Error: displays the alarm status when the robot is running abnormally.
Fig. 8-141 The system information.
8.6 Extension
The configuration of the end tools and the settings for drag teaching in the extended
interface of the teach pendant software are shown in the following figure.
































































