
























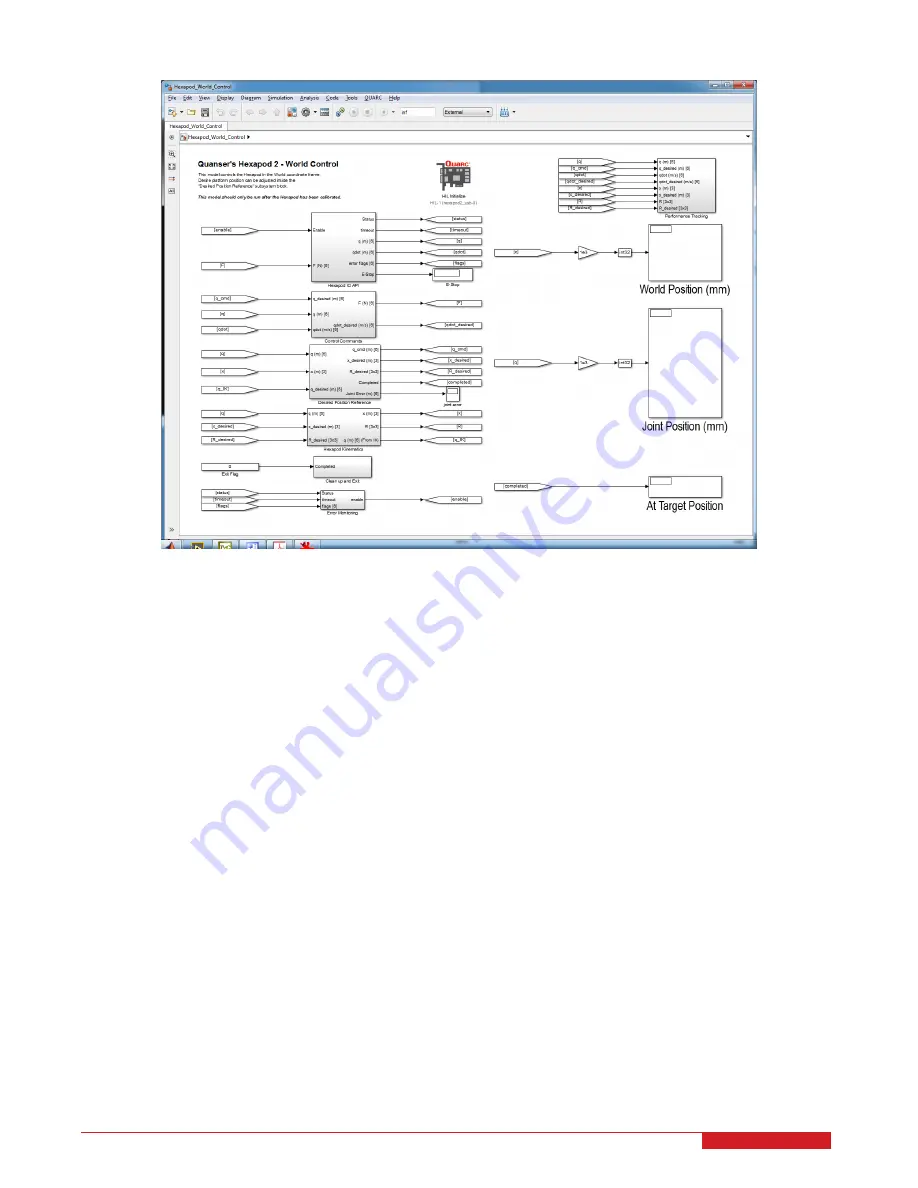
Figure 2.5: Simulink model used to command world-space positions to the 6 DOF Hexapod using QUARC.
The end-effector world coordinate commands are given in the
Desired Position Reference
subsystem block shown
in Figure 2.6. The setpoint for each of the end-effector’s axes - X, Y, Z, Pitch, Roll, and Yaw - can be set to either a
sine wave or square wave. Set the amplitude and frequency of the signal using the Slider Gain blocks. For example,
set gain block
A_x
to 2 and gain block
f_x
to 0.5 to apply a
±
2 mm sine wave at 0.5 Hz.
HEXAPOD Laboratory Guide
10