





















11
CX-692
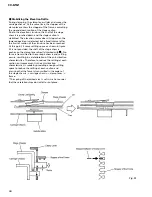
The hysteresis movement starts when a search is
finished (especially, when a feed kicking is finished) and
the hysteresis movements work to hold the tracking
error signals when the beam spot moves to off-track
positions, thus enhancing the convergence of the
tracking servo.
Regarding the hysteresis movements
TE signals
Outer peripheral direction
Inner peripheral direction
RFRP signals
after holding
TE signals
Track ON
Track ON
Track ON
Track ON
Fig. 12







































































