





























3. Save the new settings. You have the following options:
■
Save a parameter set to the positioner database on the PC, see "
Set to the Positioner Database (p. 70)
■
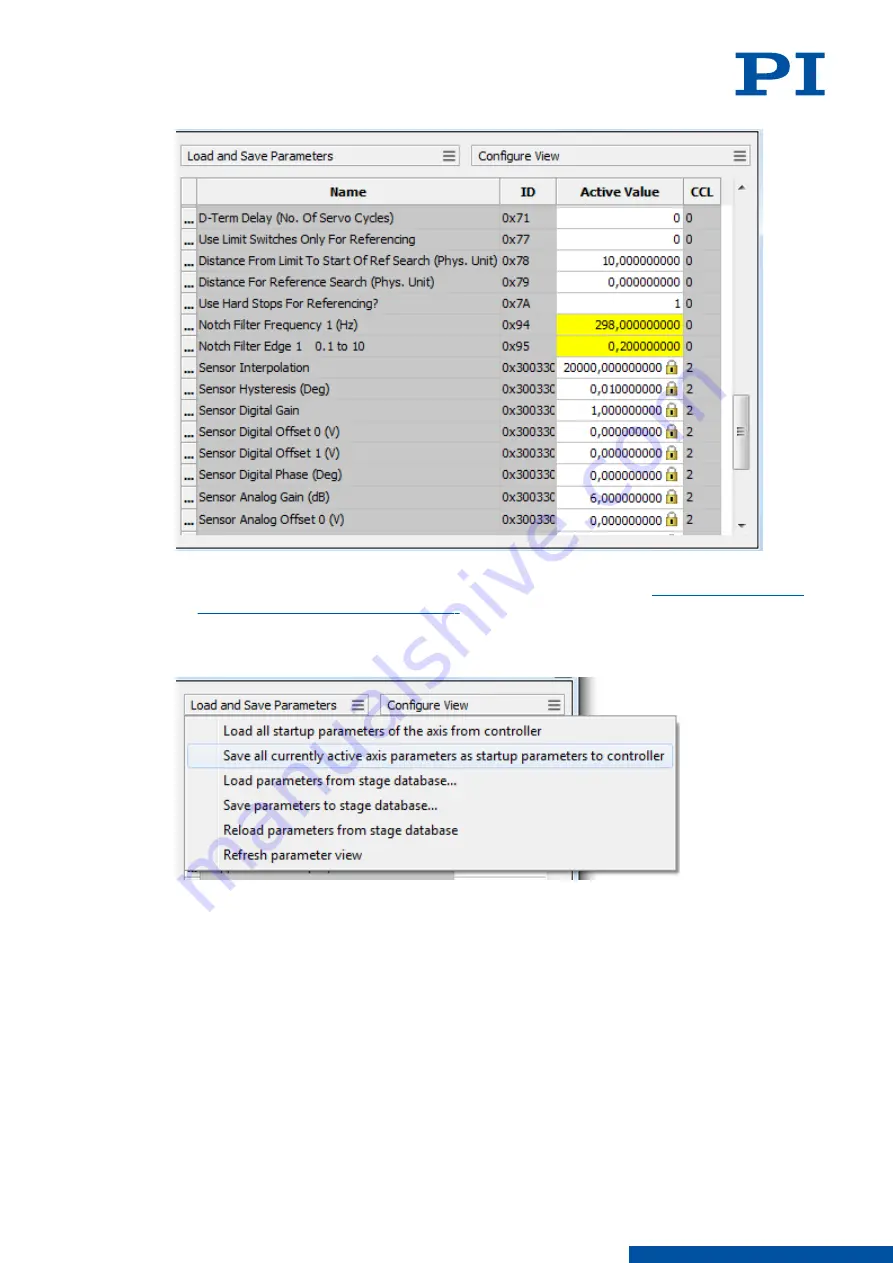
Transfer the current values of the listed parameters from the volatile memory to the
nonvolatile memory of the E-871.1A1N by clicking
Load and Save Parameters -> Save
all currently active axis parameters as startup parameters to controller
.
7.4.2
Optimizing the Servo Control Parameters
Adjusting the PID controller optimizes the dynamic properties of the system (overshoot and
settling time). The optimum PID controller setting depends on your application and your
requirements.
Typically, optimization is determined empirically, i.e, the behavior of the positioner is
monitored with different values in closed-loop operation.
The following describes the procedure for optimizing the servo control parameters in
PIMikroMove.
Requirements
✓
You have installed the positioner in the same way as it will be used in your application
(corresponding load, orientation, and mounting).
7 STARTUP / OPERATION
PZ285EN
‒
1/30/2019
67
M O T I O N | P O S I T I O N I N G