





























Microstep Waveform Generation
52
Juno Step Motor Control IC User Guide
8
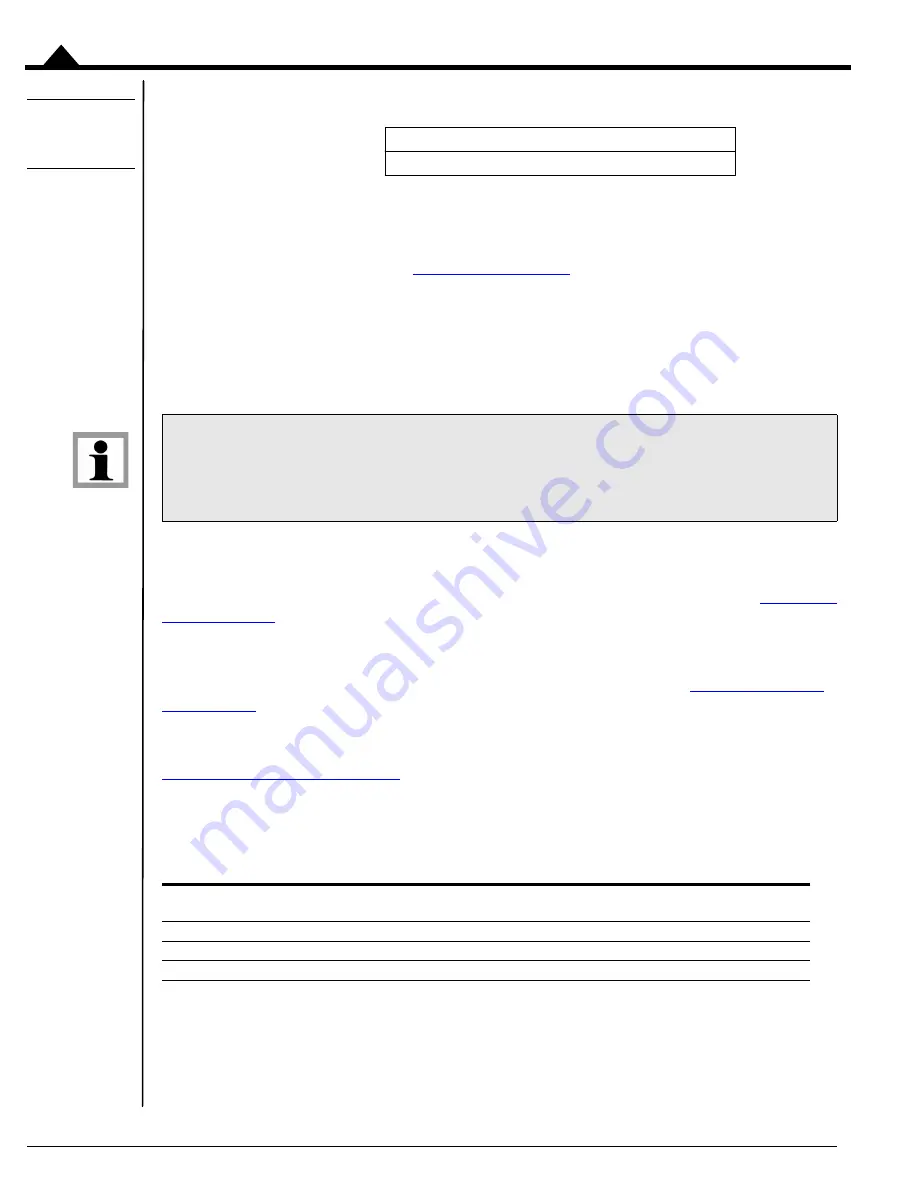
Figure 8-3:
Direct Input SPI
Format
The word returned by Juno is the previous command word received. It is recommended, but not required, that the
external circuitry read this returned word and confirm that it matches the previously transmitted word. For detailed
timing information on the SPI bus refer to
Example
The SPI bus is used to provide position command. A series of 16-bit SPI word writes is executed to control the
position. The consecutive word write values are +1, +3, +5, and +7 after which the accumulated 32-bit command
position will be +16. Then word values of -3, -5, -7, and -10 are written to the SPI port after which the 32-bit command
position will be -9.
8.6.2.1 Watchdog Timer
Juno provides a facility for detecting when SPI commands, which normally arrive on a regular basis, unexpectedly stop.
The user selects a watchdog countdown time in units of cycles. For information on Juno’s cycle time see
The default value for the watchdog countdown timer is 0 which indicates no watchdog function
is active.
If a lack of command activity occurs for more than the watchdog countdown period a watchdog error occurs, resulting
in the drive exception flag of the Event Status register being set. For more information see
Juno can be programmed to take various actions when a watchdog timeout occurs such as disabling the motor output.
The mechanism to program and process these functions is called event handling and described in detail in
12.3, “Event Action Processing.”
8.6.3
Quadrature Encoder Signal Interfacing
The table below provides a summary of the encoder related signals:.
By default the
Index
capture signal is active low, however this interpretation is user programmable.
All of the encoder related signals are digital TTL level signals, so for typical cable-based connection to a motor encoder
differential transceiver chips are used.
To avoid jitter in the step motor motion the SPI direct input commands should be streamed at a fixed regular
interval, varying in arrival time by no more than 1% of the interval between successive updates. For best perfor-
mance the update frequency should be between 1.0 kHz and 10 kHz.
Pin Name
64-Pin TQFP
Pin#
56-Pin
VQFN Pin#
Description
QuadA
62
55
Quad A input
QuadB
63
56
Quad B input
Index
4
2
Index input
Command Data Word
Direct Input Command Word
Juno Response Word
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Previous Command Data Word (may contain 0s or 1s)





















































