





























PHD User Guide
21
6. Communication
The types of communication available to the PHD family are Controller Area Network (CAN)
communication and USB host.
6.1. Controller area network
The PHD28 and PHD50 have 1 Controller Area Network (CAN) communication port available. The
PHD70 has 2 CAN communication ports available.
The PHD family hardware provides controller area network (CAN) communication according to the SAE
J1939 specification, making the PHD compatible with any CAN-based protocol through software.
CAN communication is used to communicate the status of multiple modules that are connected to each
other in the same network.
6.1.1.
CAN Capabilities
The CAN communicates information at a selectable rate from 125 kbps to 1000 kbps. Lack of regular
CAN communication is an indication that there is either a problem with a module in the network, or a
problem with the CAN bus.
CAN communication provides a feature called Wake on CAN, which is a way to provide power control to
the PHD.
Wake on CAN provides a low-current sleep mode that turns on the PHD when a CAN message is received
by the module.
It is not possible to filter messages that are used to turn on the PHD using Wake on CAN. For this reason,
any message will turn on the PHD. The application software must be written to determine how the PHD
will behave when it is turned on.
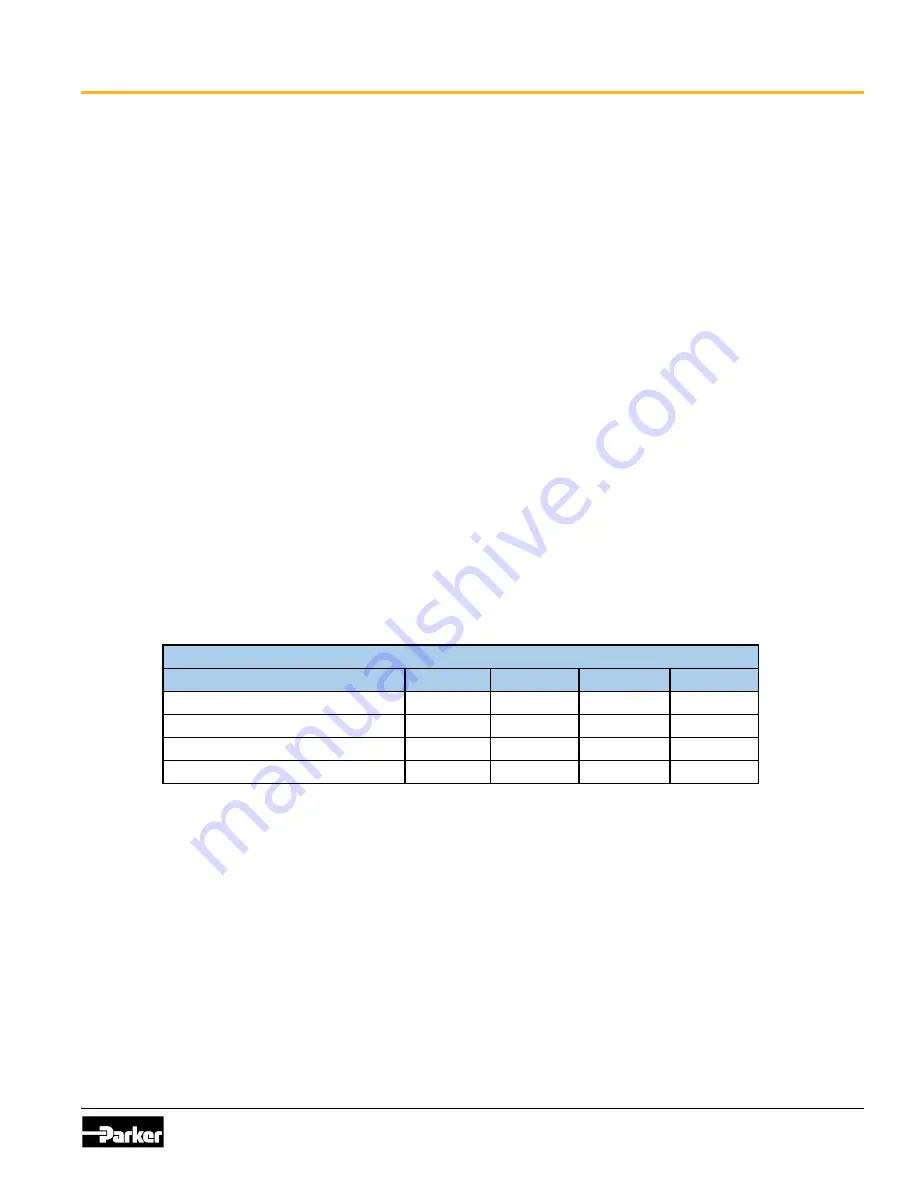
The following table provides specifications for the CAN:
CAN Specifications
Item
MIN
NOM
MAX
UNIT
Baud rate limitations (hardware)
-
-
1000
kbps
Baud rate limitations (software)
125
-
1000
kbps
Wake on CAN current draw
-
-
500
uA
Termination resistor
120
-
-
Ω
6.1.2.
PHD CAN Installation Connections
The CAN connection for the PHD should conform to the J1939 standard. The J1939 standard is a robust
automotive specification that is a good CAN installation guideline even when the J1939 CAN protocol is
not being used.
For a list of J1939 connection considerations, refer to the SAE J1939 specifications available through the
Society for Automotive Engineers. SAE J1939-11 covers the physical aspects of the CAN bus including
cable type, connector type, and cable lengths.
The standard variant of the PHD does not have a CAN termination resistor applied by default. The PHD
displays have a CAN termination pin that allows the internal termination resistor to be applied for CAN1
only.