





























Setting
up Compax3
Positioning via digital I/Os
96
192-120101 N11 C3I11T11 November 2007
4.1.10. Encoder Simulation
You can make use of a permanently integrated encoder simulation feature to make
the actual position value available to additional servo drives or other automation
components.
Simulated Encoder Output Resolution
Unit: Increments per revolution / pitch Range: 4 - 16384 Standard value: 1024
Any resolution can be set
Limit frequency: 620kHz
i. e. for:
Increments per revolution
Max. speed
1024 36000
min
-1
4096 9000
min
-1
16384 2250
min
-1
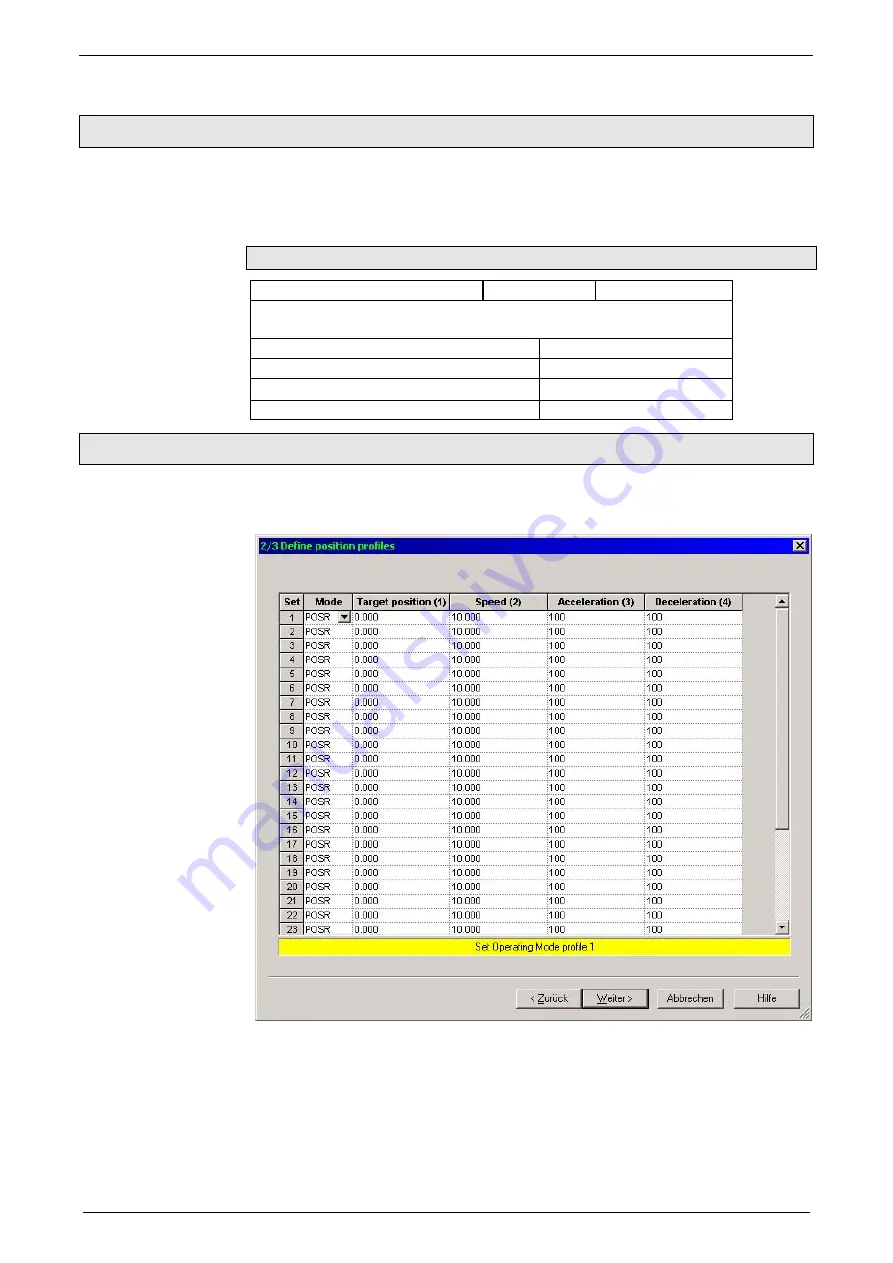
4.1.11. Positioning
Positioning takes place with 31 positioning data records (15 when operating with
machine zero) which are defined via address, mode (POSA,POSR), target position,
speed, acceleration, deceleration (delay) and number of repetitions.
The desired positioning data record is selected via the inputs (I3-I7) and started via
a START edge.
The positioning data record address is thereby read in with the START edge.
Minimum pulse duration: 1ms
Maximum 1.4ms (0.4 - 1.4ms)
Function
Condition START
edge
Reaction time





















































