





























Parker EME
Setting up Compax3
192-120100 N16 C3I10T10 - December 2010
103
4.1.7.
Command interface
Make you selection from the following command interfaces:
±10V analog setpoint commanding and encoder emulation (rotation speed control
mode)
Step/direction input RS422 (5V push-pull signal)
Step/direction input 24V level
Encoder input RS422 (5V push-pull signal)
Encoder input 24V level
±10V analog current setpoint commanding and encoder emulation (rotation
speed control mode) with different holding functions.
Encoder simulation exists with an
analog input command interface of ±10V
Step/direction input 24V level and
Encoder input 24V level
!
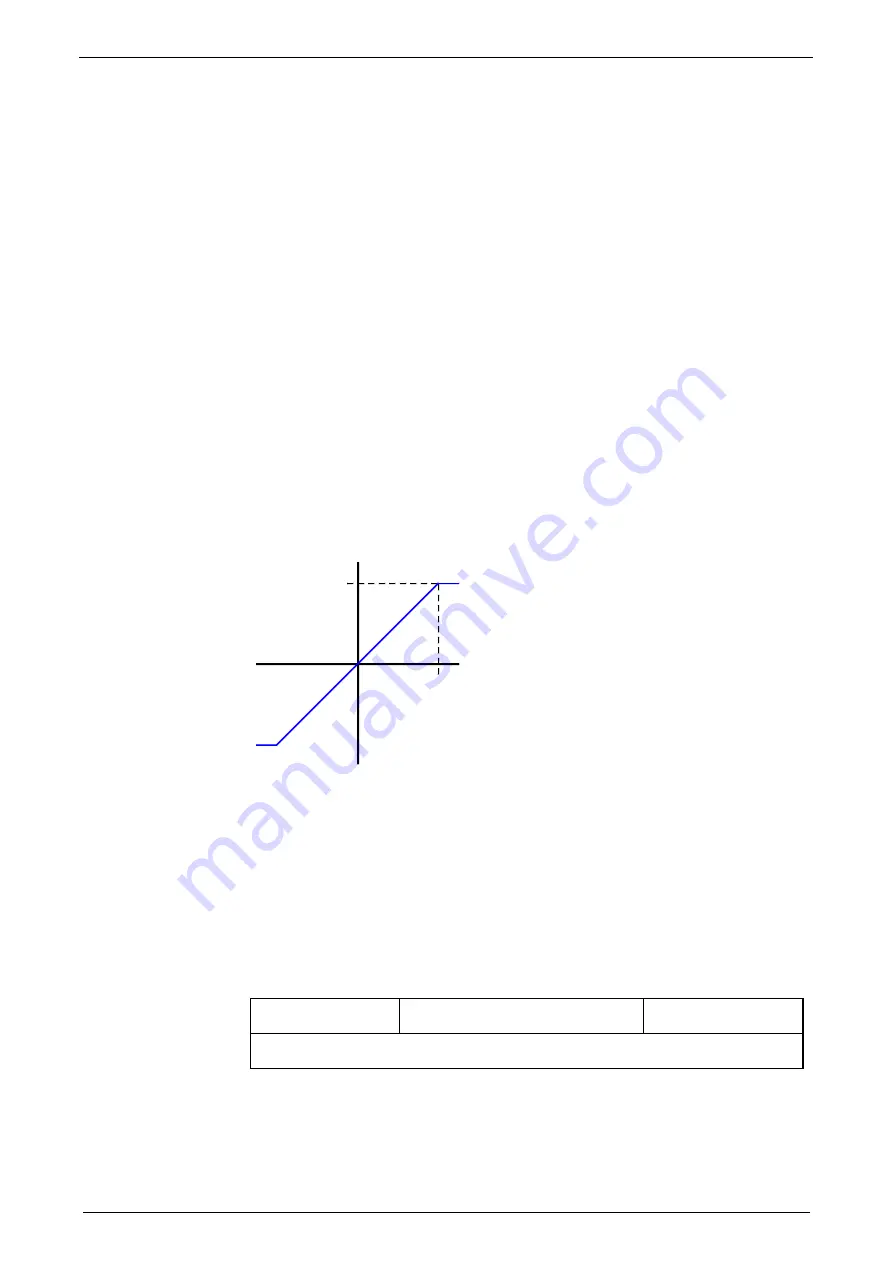
4.1.7.1
±10V analogue speed setpoint commanding and
encoder emulation
Input:
±10V analogue;
14Bit resolution;
125µs scanning rate
10V
speed
max
Keep position via I4
With I4 = “1” position setpoint = 0 is predefined.
External forces can be compensated via corresponding motor moments.
If the motor is shifted from its position by too high external forces (current limit is
reached), the drive moves to its original position (after the reduction of the external
forces).
Setting values:
Rotational speed/velocity at a setpoint of +10V
Unit:
rpm or m/s
Range: +/-0... 1.2 * reference value
Standard value:
Reference value
Defining the reference system.
Reference value = Nominal speed/velocity of the motor.
Please observe: