





























6-14
Programming Your Application
650V AC Drive
PID - Tuning Your Drive
Parameters
P
501 to
P
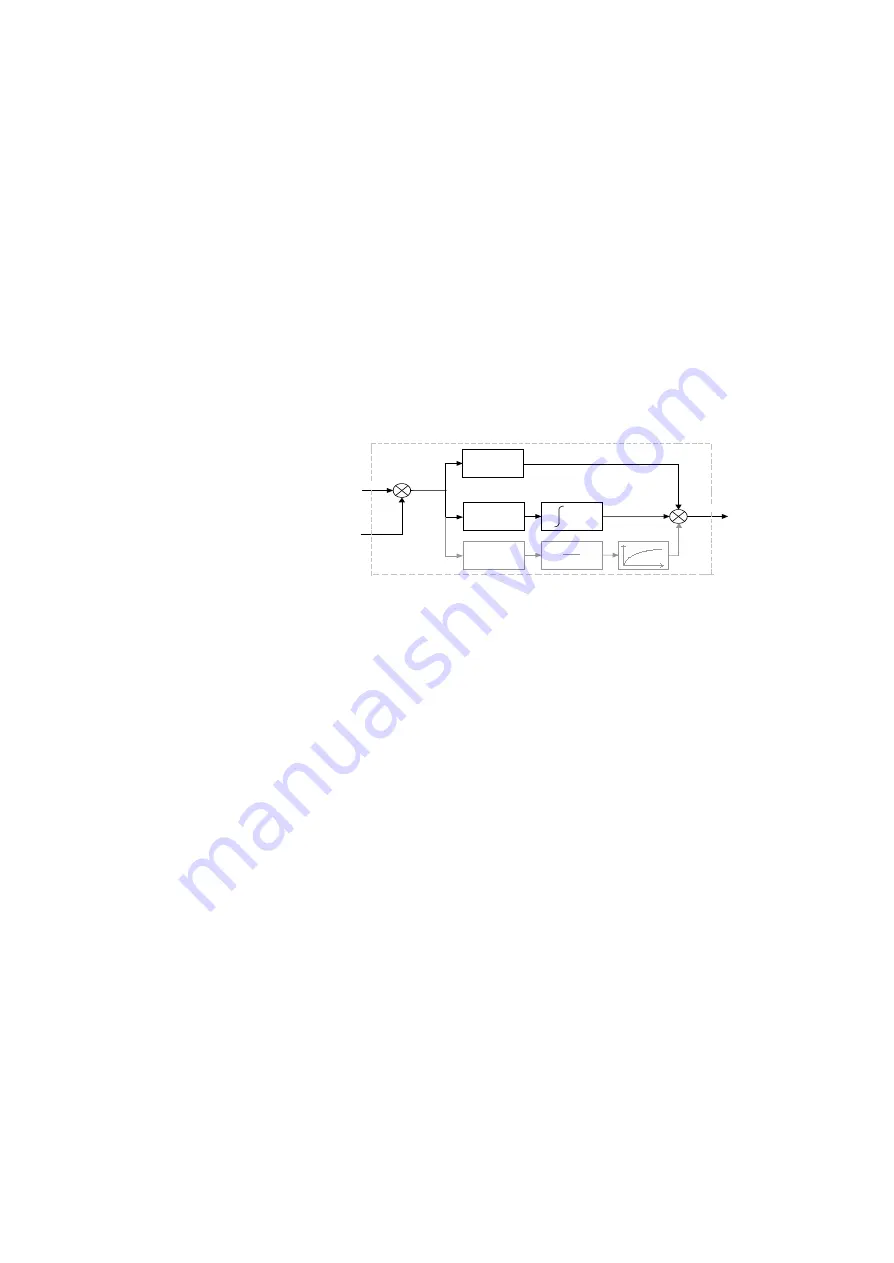
508: PID is used to control the response of any closed loop system. It is
used specifically in system applications involving the control of drives to provide zero steady
state error between Setpoint and Feedback, together with good transient performance.
P
roportional Gain (
P
501)
This is used to adjust the basic response of the closed loop control system. The PI error is
multiplied by the Proportional Gain to produce an output.
I
ntegral (
P
502)
The Integral term is used to reduce steady state error between the setpoint and feedback values
of the PI. If the integral is set to zero, then in most systems there will always be a steady state
error.
D
erivative (
P
503)
This is used to correct for certain types of control loop instability, and therefore improve
response. It is sometimes used when heavy or large inertia rolls are being controlled. The
derivative term has an associated filter to suppress high frequency signals.
•
Functions as P, PI, PID controller
•
Single symmetric limit on output
P G a in
I G a in
d t
S e tp o in t
E rro r
+
-
+
+
O u tp u t
F e e d b a c k
(A IN 2 )
(A IN 1 )
D G a in
d t
d
+





















































