



























No. SX-DSV02829 -
133-
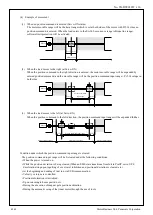
6-3-2 Sequence at Servo-Off
Operation sequence of the servo-off state is set by 605Ah(
Quick stop option code
), 605Bh(
Shutdown option code
) and
605Ch (Disable operation option code).
Deceleration function on the servo (MINAS-A5) side is activated when these objects is zero.
Deceleration function on the CoE (CiA402) side is activated when these objects is non-zero.
This section explains deceleration function on the servo (MINAS-A5) side.
Please refer to section 6-9-2 "4) Disable operation option code (605Ch)" of Technical Document "EtherCAT
Communication Specifications" (SX-DSV02830) for details of deceleration function on the CoE (CiA402) side.
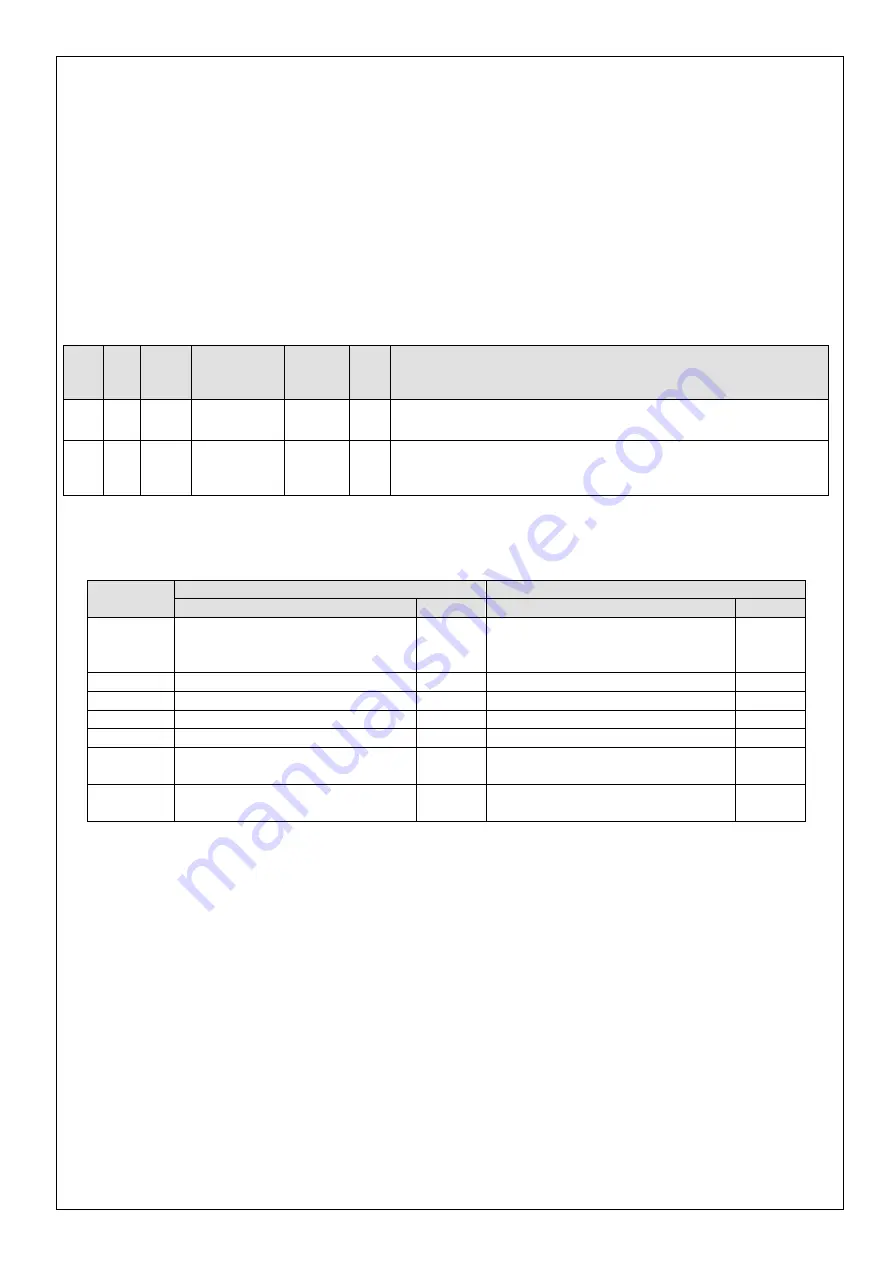
(1) Parameters
Class No.
At-
trib-
ute *1)
Title
Range
Unit
Function
5
06
B
Sequence at
Servo-Off
0–9
—
Specify the status during deceleration and after stop, after servo-off.
5
11
B
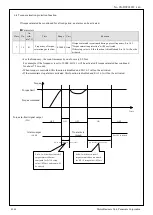
Torque setup
for emergency
stop
0–500
%
Set up the torque limit at emergency stop.
When setup value is 0, the torque limit for normal operation is applied.
*1) For parameter attribute, refer to Section 9-1.
(2) Contents
• Details of Pr 5.06 (Sequence at Servo-Off)
Pr 5.06
During deceleration *4)
After stalling (Approx.30 r/min or below)
Stopping method
Deviation
Operation after stopping
Deviation
Common
• Forcibly controls the position. *1)
• Forcibly stops position command
generation. *1)
—
• Forcibly controls the position. *1)
• Forcibly stops position command
generation. *1)
—
0,4
• Dynamic brake action
Clear *2)
• Dynamic brake action
Clear *2)
1,5
• Free run (DB OFF)
Clear *2)
• Dynamic brake action
Clear *2)
2,6
• Dynamic brake action
Clear *2)
• Free run (DB OFF)
Clear *2)
3,7
• Free run (DB OFF)
Clear *2)
• Free run (DB OFF)
Clear *2)
8
• Emergency stop *3) *5) *6)
• Torque limit =Pr 5.11
Clear *2)
• Dynamic brake action
Clear *2)
9
• Emergency stop *3) *5) *6)
• Torque limit =Pr 5.11
Clear *2)
• Free run (DB OFF)
Clear *2)
*1) During deceleration sequence or at the stop (servo OFF), the system has to control the position and to stop the
generation of internal position command.
*2) During deviation clearing process, the system causes the internal command position to follow up the feedback position.
When executing the interpolation feed system command after servo ON, re-set the command coordinate of the host
controller. The motor may operate sharply.
*3) Emergency stop refers to a controlled immediate stop with servo-on. The torque command value is limited during this
process by Pr 5.11 Emergency stop torque setup.
In an emergency stop, since normal operation is performed during the time between the servo OFF command and
the start of the emergency stop, a torque disallowed by normal torque limitation may be output.
To allow a stop with the torque specified in the Emergency stop torque setup, continue to send the normal positional
command at least 4 ms after the input of the servo OFF command.
*4) Deceleration period is the time required for the running motor to speed down to 30 r/min. Once the motor speed drops
below 30r/min, it is treated as in stop state regardless of its speed.
*5) During magnet pole position estimation and during the automatic setup of scale/CS directions, an immediate stop is
disabled and deceleration is enabled with the operation of the dynamic brake (DB).
*6) After immediate stop start, please continue to send Servo off command(PDS command “Disable operation”,
“Shutdown”, “Disable voltage”, “Quick Stop”) until the motor is stopped.
R1.00
Motor Business Unit, Panasonic Corporation







































































