





























6 - 3
6 Basic Control Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
6
-1 O
u
tline o
f Co
nt
ro
l Fu
nct
ion
s
6
6-
1-2 Co
ntrol Method
For the 1S-series Servo Drives, TDF control and ODF control are available.
TDF control is a control method proper for positioning control. The smooth internal commands are gen-
erated so that the control target can be followed, and TDF controls the internal commands. In TDF con-
trol, the following ability for the internal commands is improved and the overshooting is reduced making
it easier to reduce the positioning stabilization time. Use TDF control to reduce the impact on devices. If
the delay of the internal commands itself for a command value seems to be a problem, adjust the com-
mand following gain.
ODF control is a control method proper to use when a high-precision path following performance such
as synchronization control is necessary. The delay for a command can be minimized by setting the
ODF Velocity Feed-forward - Gain to a larger value such as 100%. However, if a command that
changes the acceleration rapidly is given, the command cannot be followed, and the overshooting
occurs. In this case, correct the command value itself so that the command value change gets
smoother.
6-1-2
Control Method
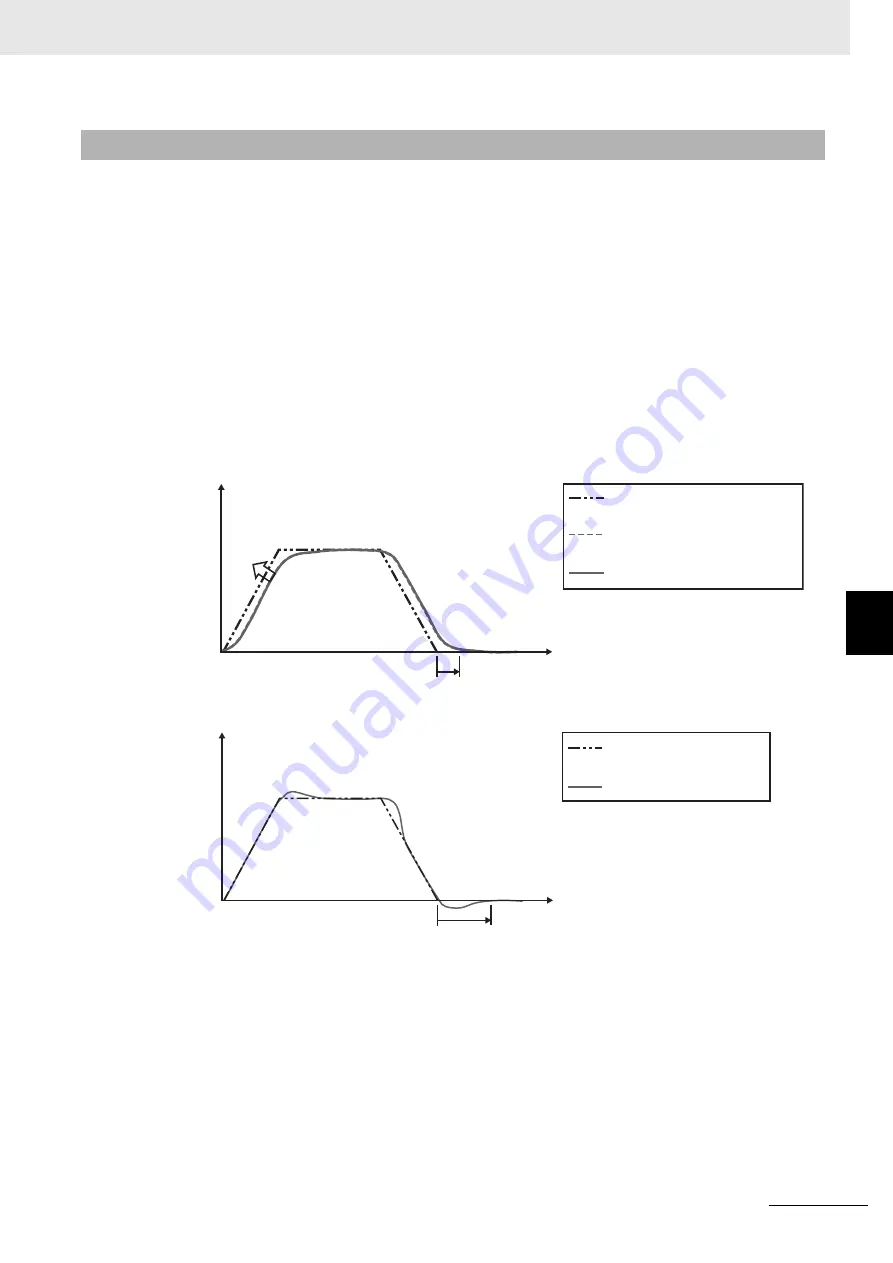
Position Command
Motor Velocity
Internal Position Command
Motor Velocity
Present Motor Velocity
Time
Velocity
Setting time
Larger command
following gain
Time response waveform in TDF control
Time
Velocity
Setting time
Time response waveform in ODF control
(ODF Velocity Feed-forward–Gain=100%)
Position Command
Motor Velocity
Present Motor Velocity
Summary of Contents for R88D-1SN ECT Series
Page 973: ......