





























3 Setting Robot Functions
3 - 4
NJ-series NJ Robotics CPU Unit User’s Manual (W539)
Precautions for Safe Use
Select
Immediate stop
or
Immediate stop and Servo OFF
when using Delta 3, Delta 3R, Delta
2, Cartesian 2D Gantry or Cartesian 3D Gantry robot.
Use the Sysmac Studio to set the axis parameters for each axis.
When axes of the robot operates separately, each axis operation follows its
Axis Settings
. The settings
of three axes must be the same.
If you use the MC_SyncLinearConveyor (Start Conveyor Synchronization) instruction, you must also
set the conveyor axes.
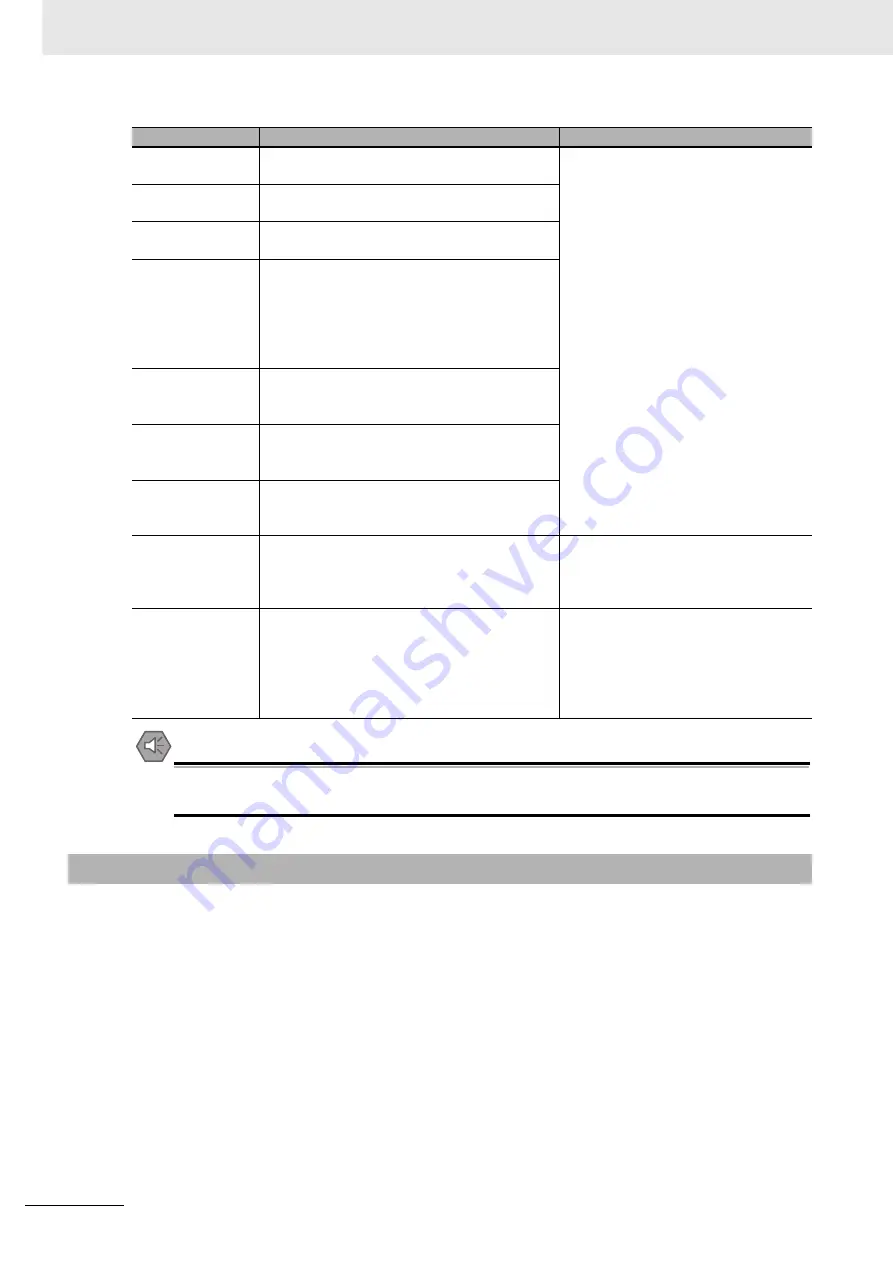
Parameter name
Setting
Set value
Maximum Interpo-
lation Velocity
Set the maximum interpolation velocity for the
trajectory.
Use the default value.
Maximum Interpo-
lation Acceleration
Set the maximum interpolation acceleration for
the trajectory.
Maximum Interpo-
lation Deceleration
Set the maximum interpolation deceleration for
the trajectory.
Interpolation Accel-
eration/Decelera-
tion Over
Select the operation for when the maximum
interpolation acceleration/deceleration may be
exceeded after excessive deceleration during
the axes group acceleration/deceleration control
because stopping at the target position is given
priority.
Interpolation Veloc-
ity Warning Value
Set the percentage of the maximum interpola-
tion velocity at which to output an interpolation
velocity warning.
Interpolation Accel-
eration Warning
Value
Set the percentage of the maximum interpola-
tion acceleration at which to output an interpola-
tion acceleration warning.
Interpolation
Deceleration Warn-
ing Value
Set the percentage of the maximum interpola-
tion deceleration rate at which to output an inter-
polation deceleration warning.
Axes Group Stop
Method
Set how to stop the composition axes that have
no error when an error that forces an immediate
stop occurs in an axis during a multi-axes coor-
dinated motion.
Correction Allow-
ance Ratio
This parameter applies when the center desig-
nation method is used for a circular interpolation
instruction. It compensates the distance when
the distance between the start point and the
center point does not equal the distance
between the end point and the center point.
Use the default value.
3-1-3
Axis Settings
Summary of Contents for NJ501-4300
Page 13: ...11 CONTENTS NJ series NJ Robotics CPU Unit User s Manual W539 ...
Page 40: ...Revision History 38 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Page 90: ...2 Features of NJ Robotics CPU Unit 2 40 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Page 204: ...5 Vision Robot Integrated Simulation 5 6 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Page 308: ...6 Troubleshooting 6 104 NJ series NJ Robotics CPU Unit User s Manual W539 ...
Page 333: ...I 1 I NJ series NJ Robotics CPU Unit User s Manual W539 Index ...
Page 335: ......







































































