





























5-11
5 Motion Control Parameters
NJ-series CPU Unit Motion Control User’s Manual (W507)
5-2 Axis P
aram
eter
s
5
5-2-4 Op
er
atio
n Setting
s
Additional Information
Parameter Settings for a Reduction Ratio of 1/9 for the Setting Example
The travel distance of the workpiece for one rotation of the Servomotor is 10 mm
×
1/9, or
1.1111... mm (a repeating decimal number).
For numbers that do not divide evenly, multiply the command pulse count per motor rotation and
the work travel distance per motor rotation by the same coefficient and set the parameters to the
results. Here, the reduction ratio is 1/9, so we use 9 as our coefficient.
•
Command Pulse Count Per Motor Rotation: 1,179,648 (131072
×
9)
•
Work Travel Distance Per Motor Rotation: 10 (10
×
1/9
×
9)
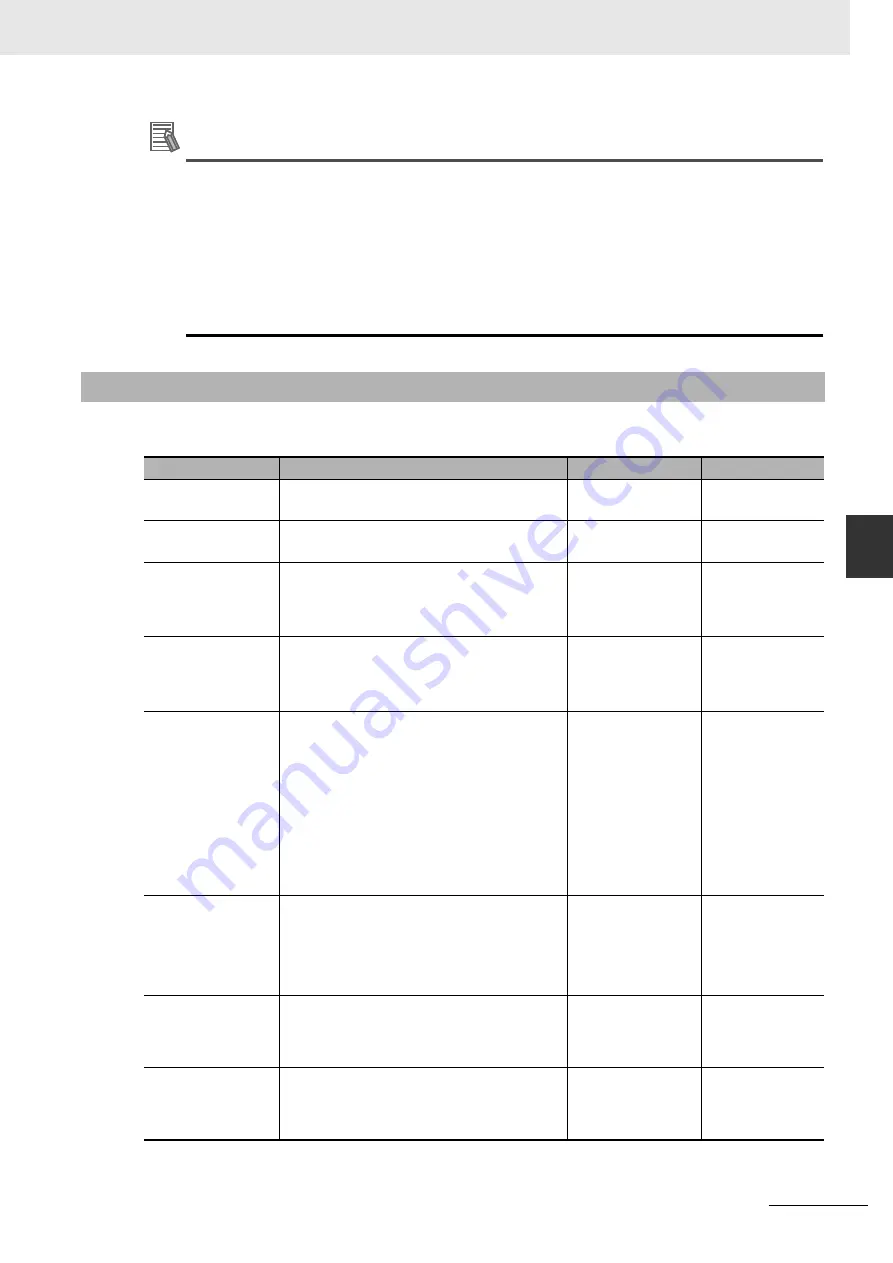
These parameters set items for axis operation, such as the maximum velocity and maximum accelera-
tion/deceleration rate. Set them according to the specifications of the device you are controlling.
5-2-4
Operation Settings
Parameter name
Function
Setting range
Default
Maximum Velocity
Set the maximum velocity for each axis.
*1
(Unit: command units/s)
Positive long reals
400,000,000
Maximum Jog
Velocity
Set the maximum jog velocity for each axis.
*2
(Unit: command units/s)
Positive long reals
1,000,000
Maximum Accelera-
tion
Set the maximum acceleration rate for an axis
operation command. There will be no limit to
the acceleration rate if 0 is set. (Unit: com-
mand units/s
2
)
Non-negative long
reals
0
Maximum Decelera-
tion
Set the maximum deceleration rate for an axis
operation command. There will be no limit to
the deceleration rate if 0 is set. (Unit: com-
mand units/s
2
)
Non-negative long
reals
0
Acceleration/Decel-
eration Over
Set the operation for when the maximum
acceleration/deceleration rate would be
exceeded after excessive acceleration/decel-
eration during acceleration/deceleration con-
trol of the axis because stopping at the target
position is given priority.
0: Use rapid acceleration/deceleration. (Blend-
ing is changed to Buffered.)
1: Use rapid acceleration/deceleration.
2: Minor fault stop
0 to 2
0
Operation Selection
at Reversing
Specify the operation for reversing rotation for
multi-execution of instructions, re-execution of
instructions, and interrupt feeding.
*3
0: Deceleration stop
1: Immediate stop
0 to 1
0
Velocity Warning
Value
Set the percentage of the maximum velocity at
which to output a velocity warning for the axis.
No velocity warning is output if 0 is set. (Unit:
%)
0 to 100
0
Acceleration Warn-
ing Value
Set the percentage of the maximum accelera-
tion rate at which to output an acceleration
warning for the axis. No acceleration warning
is output if 0 is set. (Unit: %)
0 to 100
0
Summary of Contents for NJ501-1300
Page 12: ...Sections in this Manual 10 NJ series CPU Unit Motion Control User s Manual W507...
Page 18: ...16 NJ series CPU Unit Motion Control User s Manual W507 CONTENTS...
Page 22: ...Read and Understand this Manual 20 NJ series CPU Unit Motion Control User s Manual W507...
Page 34: ...Revision History 32 NJ series CPU Unit Motion Control User s Manual W507...
Page 86: ...3 Configuring Axes and Axes Groups 3 28 NJ series CPU Unit Motion Control User s Manual W507...
Page 122: ...5 Motion Control Parameters 5 24 NJ series CPU Unit Motion Control User s Manual W507...
Page 158: ...6 Motion Control Programming 6 36 NJ series CPU Unit Motion Control User s Manual W507...
Page 166: ...7 Manual Operation 7 8 NJ series CPU Unit Motion Control User s Manual W507...
Page 182: ...8 Homing 8 16 NJ series CPU Unit Motion Control User s Manual W507...
Page 346: ...10 Sample Programming 10 92 NJ series CPU Unit Motion Control User s Manual W507...
Page 422: ...Appendices A 18 NJ series CPU Unit Motion Control User s Manual W507...
Page 423: ...Index 1 NJ series CPU Unit Motion Control User s Manual W507 I Index...
Page 430: ...Index 8 NJ series CPU Unit Motion Control User s Manual W507 Index...







































































