





























Chapter 6: Acuity Localization
Creating a Map
After finishing the scan, proceed with creating a map:
1. Open the scan file on the AMR using MobilePlanner > File > Open on Robot.
l
Select the IP address of your AMR.
l
Both a .2d and a .z2d version of the scan file you just created will exist on the
AMR.
Choose the .z2d version of the scan file, which contains both the light data and
laser data.
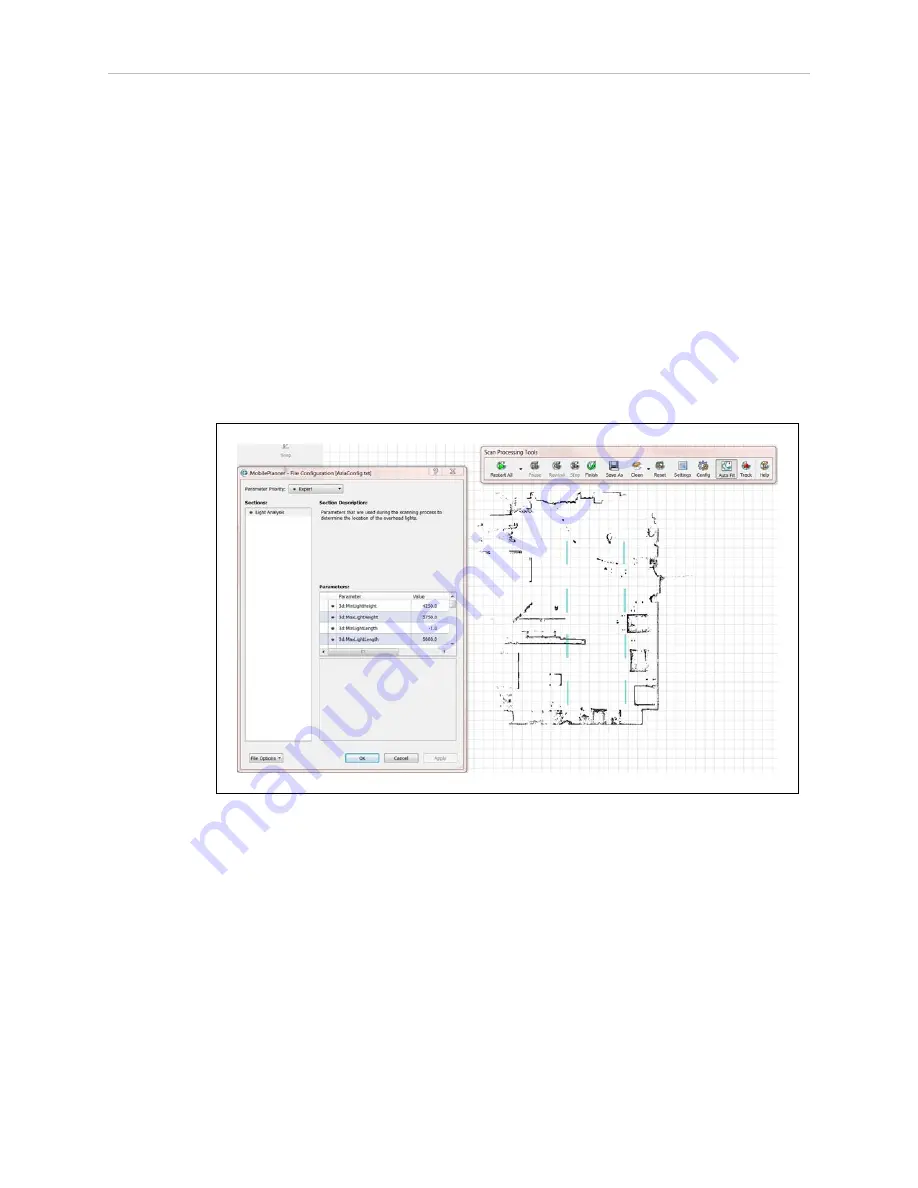
The laser scan will be processed first, followed by the extra processing for the lights. If
all of the parameters were set properly, the light blue light items will be visible on the
map overlaid on the points and lines from the laser data.
Figure 6-21
Initial Map, with both Laser and Light Data
2. If you are satisfied with the map:
NOTE:
Check that the lights are where you think they should be, and
their general dimensions are accurate.
a. Save it to your PC.
NOTE:
If you have lights at multiple heights, do not click Finish
on the Scan Processing Tools toolbar.
13732-000 Rev J
LD Platform Peripherals Guide
109