





























Chapter 3: Robot Installation
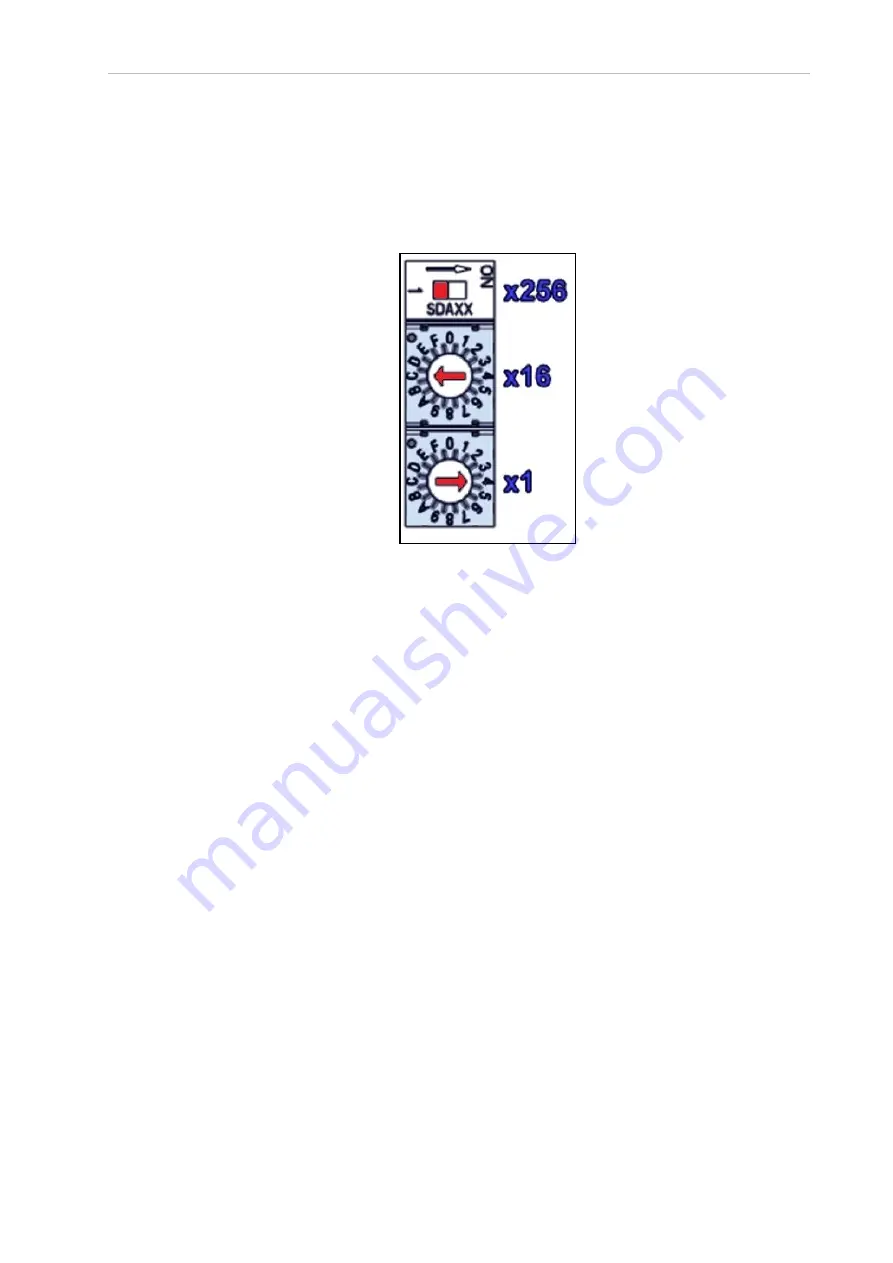
3. Set the x16 rotary switch to C.
4. Set the x1 rotary switch to 4.
NOTE:
Use Sysmac Studio to verify the EtherCAT node ID setting. Refer to
Sys-
mac Studio Robot Integrated System Building Function with Robot Integrated CPU Unit
Operation Manual (Cat. No. W595)
for more information.
Figure 3-15. EtherCAT Node ID Set to 196
3.8 Installing End-of-Arm Tooling
Robots with 4 axis have a tool flange that rotates within the platform.
When mounting end-of-arm tooling to the tool flange, ensure that the fasteners used engage the
threads in the tool flange between 8 mm and 11 mm.
Additional Information
: Refer to Tool Flange Dimensions on page 123 for more
information.
3.9 Installing a Cable Inlet Box
Use the following procedure to install an optional cable inlet box to increase the IP rating of
the robot.
Consider the extra height required to accommodate this unit.
22792-000 Rev. A
iX3 565 Robot with EtherCAT User’s Manual
55