





























Chapter 5: Configuration with ACE Software
This includes camera setup, calibration, and Locator Model creation.
l
Phase 4/4 - Teach Place for Static Position Configuration
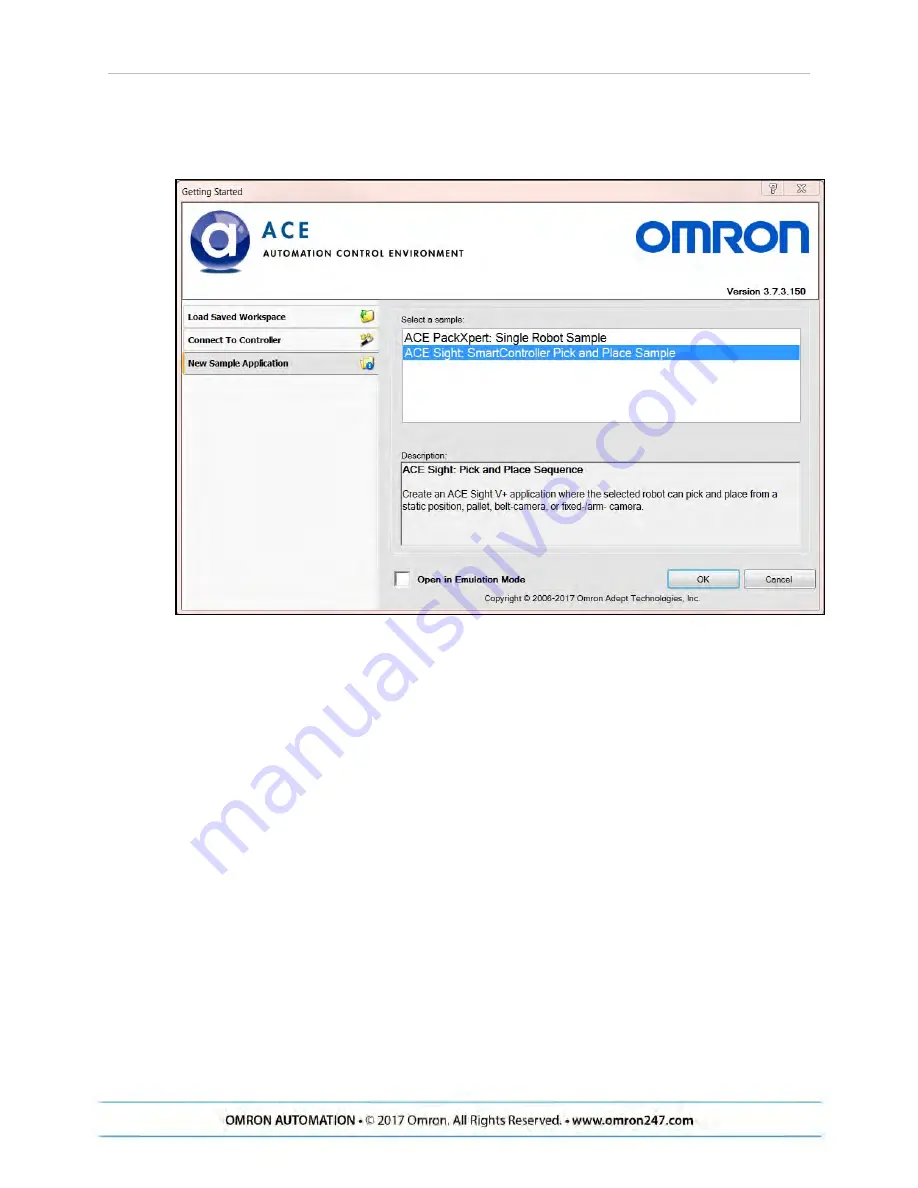
Figure 5-2. ACE Sight Pick and Place Sample
Safe and Picture-taking Positions
For teaching the Safe Position or Picture Position, you can either move the robot using a
pendant, the jog pendant feature in ACE, or move the robot manually. Some of the joints may
need to be released with the brake release button when moving them manually.
The Safe Position is where the robot moves when its current motion gets interrupted or
stopped.
The location of these positions can affect the system’s efficiency.
After selecting the Safe and Picture-taking Positions, verify that the robot can reach those pos-
itions, with all joints remaining within their limits, by clicking Move in the bottom left of the
screen.
NOTE:
If possible, make the tool flange higher than the sides of the AnyFeeder in
both of these positions, to reduce any chance of a collision.
Create Feeder
This step includes specifying the AnyFeeder model you are using, its position, checking the
functionality of its backlight (if present), as well as a variety of motion sequences.
AnyFeeder
Integration
Guide
- Page
3
1





















































