





























Chapter 33 Boot Assist Module (BAM)
MPC5602P Microcontroller Reference Manual, Rev. 4
Freescale Semiconductor
833
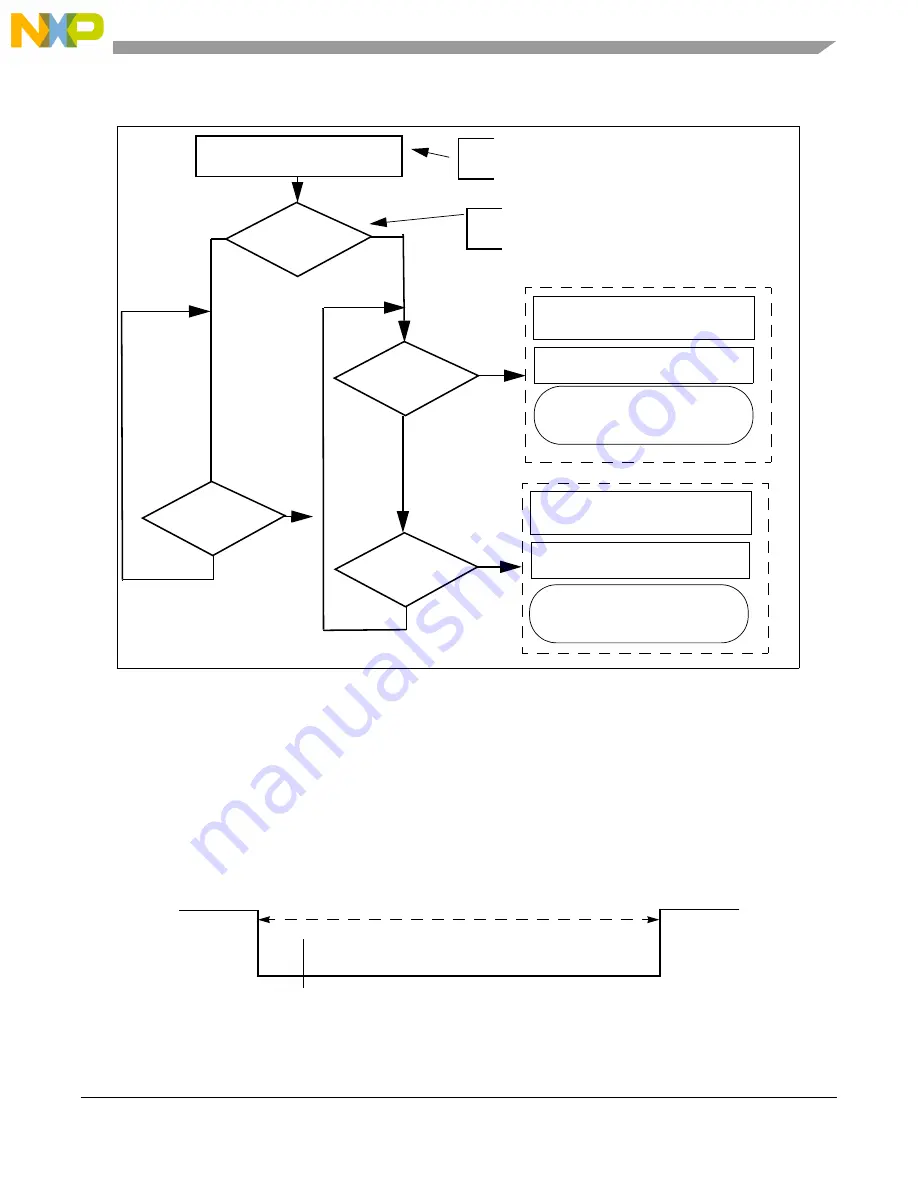
Figure 33-9. BAM Autoscan code flow
33.6.1.2
Boot from UART with autobaud enabled
The only difference between booting from UART with autobaud enabled and booting from UART with
autobaud disabled is that a further byte is sent from the host to the MCU when autobaud is enabled. The
value of that byte is 0x00.
This first byte measures the time from falling edge and rising edge. The baud rate can be calculated from
this time.
Figure 33-10. Baud measurement on UART boot
FlexCAN RX and LINFlex RX
configured as GPIO inputs
FlexCAN RX
== 1
FlexCAN RX
== 0
LINFlex RX
== 0
CAN A
u
to
bau
d
Set matching baud rate
for FlexCAN
Autobaud measurement
Continue with FlexCAN
L
INFle
x A
u
toba
ud
Set matching baud rate
for LINFlex
Autobaud measurement
download
Continue with LINFlex
download
NO
YES
detected
detected
LINFlex RX
== 0
detected
Both RDX pins have to be at high level.
Avoid to connect them to external pull-down resistor.
If CAN is connected, after reset CAN_RX has to be
at high level
Time measurement
Start
0x0
bit





















































