





























UM10503
All information provided in this document is subject to legal disclaimers.
© NXP B.V. 2015. All rights reserved.
User manual
Rev. 2.1 — 10 December 2015
1241 of 1441
NXP Semiconductors
UM10503
Chapter 45: LPC43xx/LPC43Sxx C_CAN
A status interrupt is generated by bits BOFF, EWARN, RXOK, TXOK, or LEC. BOFF and
EWARN generate an error interrupt, and RXOK, TXOK, and LEC generate a status
change interrupt if EIE and SIE respectively are set to enabled in the CANCTRL register.
A change of bit EPASS and a write to RXOK, TXOK, or LEC will never create a status
interrupt.
Reading the CANSTAT register will clear the Status Interrupt value in the CANIR register.
45.6.1.3 CAN error counter
5
EPASS
Error passive
0
RO
0
The CAN controller is in the error active state.
1
The CAN controller is in the error passive state as defined in the
CAN
2.0 specification
.
6
EWARN
Warning status
0
RO
0
Both error counters are below the error warning limit of 96.
1
At least one of the error counters in the EC has reached the error
warning limit of 96.
7
BOFF
Busoff status
0
RO
0
The CAN module is not in busoff state.
1
The CAN controller is in busoff state.
31:8
-
-
reserved
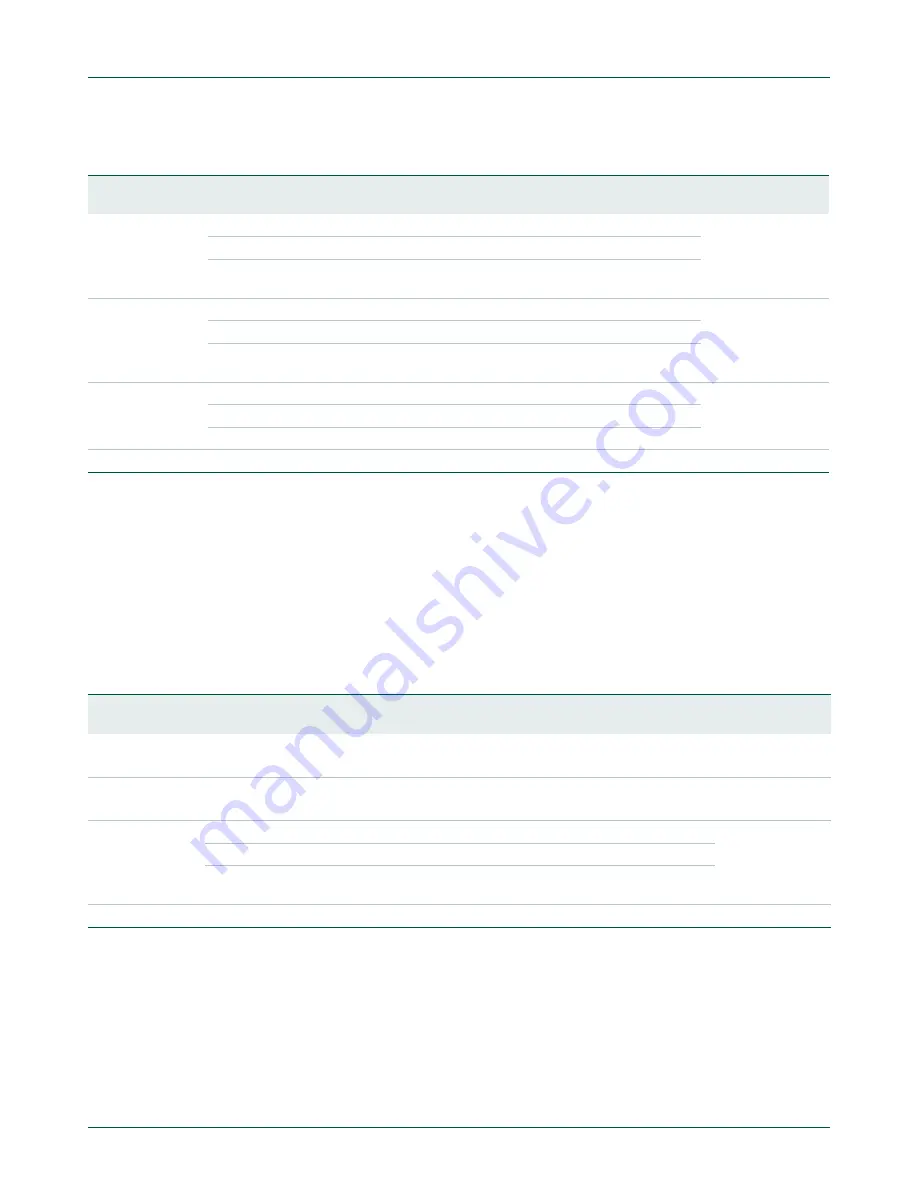
Table 1037.CAN status register (STAT, address 0x400E 2004 (C_CAN0) and 0x400A 4004 (C_CAN1)) bit description
…continued
Bit
Symbol
Value
Description
Reset
value
Access
Table 1038.CAN error counter (EC, address 0x400E 2008 (C_CAN0) and 0x400A 4008 (C_CAN1)) bit description
Bit
Symbol
Value
Description
Reset
value
Access
7:0
TEC_7_0
Transmit error counter
Current value of the transmit error counter (maximum value 255)
0
RO
14:8
REC_6_0
Receive error counter
Current value of the receive error counter (maximum value 127).
0
RO
15
RP
Receive error passive
0
RO
0
The receive counter is below the error passive level.
1
The receive counter has reached the error passive level as defined in the
CAN2.0 specification
.
31:16 -
-
Reserved
-
-





















































