

























33
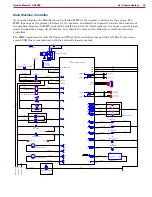
04 - Control System
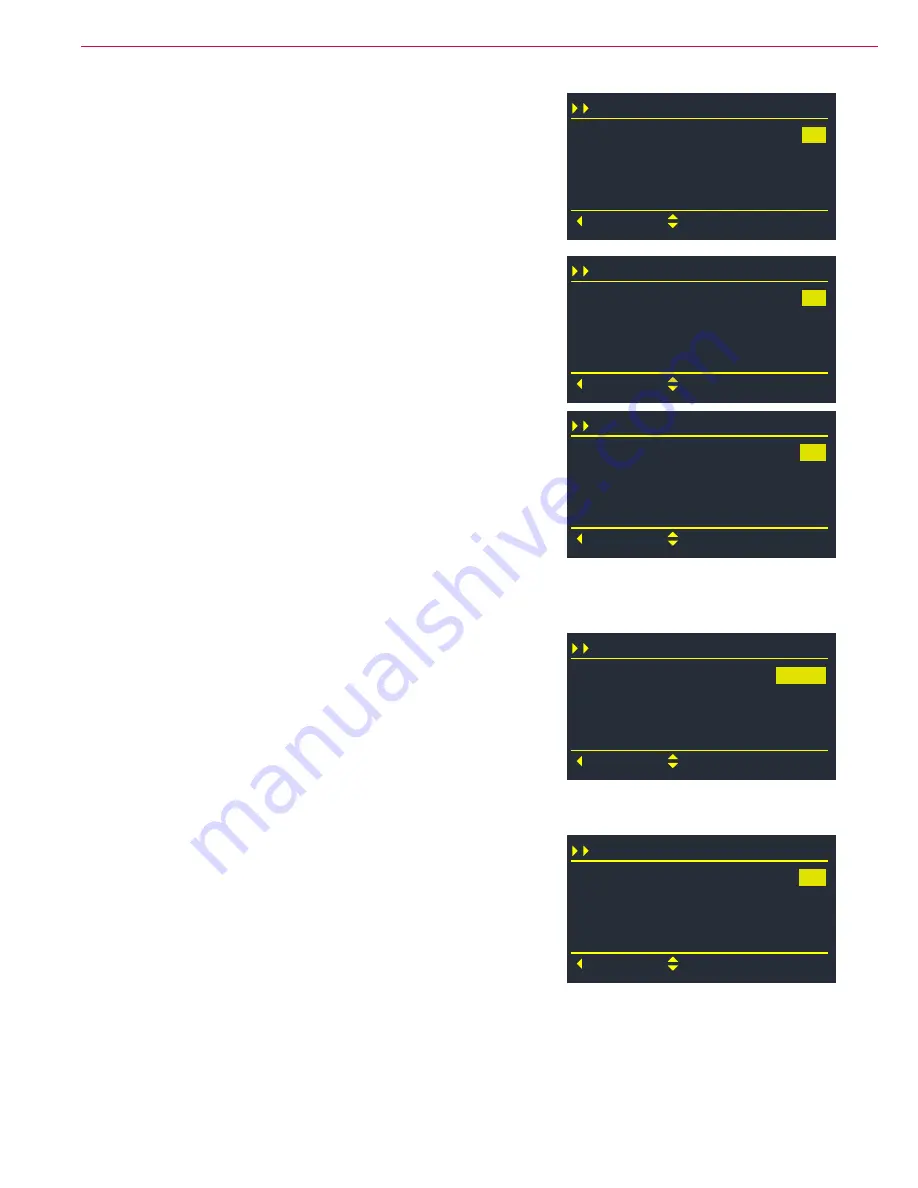
Right and Left Brush
These two screens allow On/Off control of the brush motors The
additional 3 lines provide status on the motor The Output Module
provides soft-start control to the motor. The first screen capture to
the right shows the motor status during the soft-start phase, and the
second screen capture shows the steady-state status
Note how the Main Controller’s requested PWM is 100%, but during
startup, the actual output PWM ramps upward until it reaches
100% Also note that the startup current is very high while the
motor is increasing its speed, and then tapers off to a lower level
once the motor is at-speed (The deck is raised in this example, so
the motor is not under load )
Vacuum 1 and 2
These two screens provide Off/On power control to the main vacuum
and optional second vacuum motors Pressing the Up/Down arrow
buttons cycle through the power options
The soft-startup of the motors is similar to what was described above
for the brush motors The startup and operation of vacuum motors
is slightly different from other motors They start up with minimal
resistance, but the load increases as the motor approaches operating
speed Because the squeegee was raised for this example, the
vacuum motor will be operating at maximum load because the inlet
air flow is unrestricted. Blocking the vacuum inlet actually reduces
the load on the motor
Squeegee Lift
The Squeegee Lift screen provides Up/Down/Off control for the
squeegee lift actuator However, the actuator still controls the upper
and lower position limits mechanically, inside the actuator body
Therefore, if the squeegee is already raised and you issue the UP
command, the actuator still will not move, because the mechanical
limit is already reached Another effect that you may notice is that
the Output PWM will remain at 100%, but when the lift reaches its
limit, the current drops to zero
Deck Lift
The Deck Lift screen provides Up/Down/Off control for the deck lift
actuator However, the actuator still controls the upper and lower
position limits mechanically, inside the actuator body Therefore,
if the deck is already raised and you issue the UP command, the
actuator still will not move, because the mechanical limit is already
reached Another effect that you may notice is that the Output PWM
will remain at 100%, but when the lift reaches its limit, the current
drops to zero
Output Test
M1 RIGHT BRUSH
Back
Set
M1 PWM REQ %
M1 PWM Out %
M1 Amps
On
100
49
10.1
Output Test
M1 RIGHT BRUSH
Back
Set
M1 PWM REQ %
M1 PWM Out %
M1 Amps
On
100
100
3.4
Output Test
M4 VACUUM 1
Back
Set
M4 PWM REQ %
M4 PWM Out %
M4 Amps
On
100
12
11.5
Output Test
M6 SQUEEGEE
Back
Set
M6 PWM REQ %
M6 PWM Out %
M6 Amps
Down
-99
-94
0.9
Output Test
M7 DECK
Back
Set
M7 PWM REQ %
M7 PWM Out %
M7 Amps
Up
100
95
1.4







































































