





























33
3.3.3.
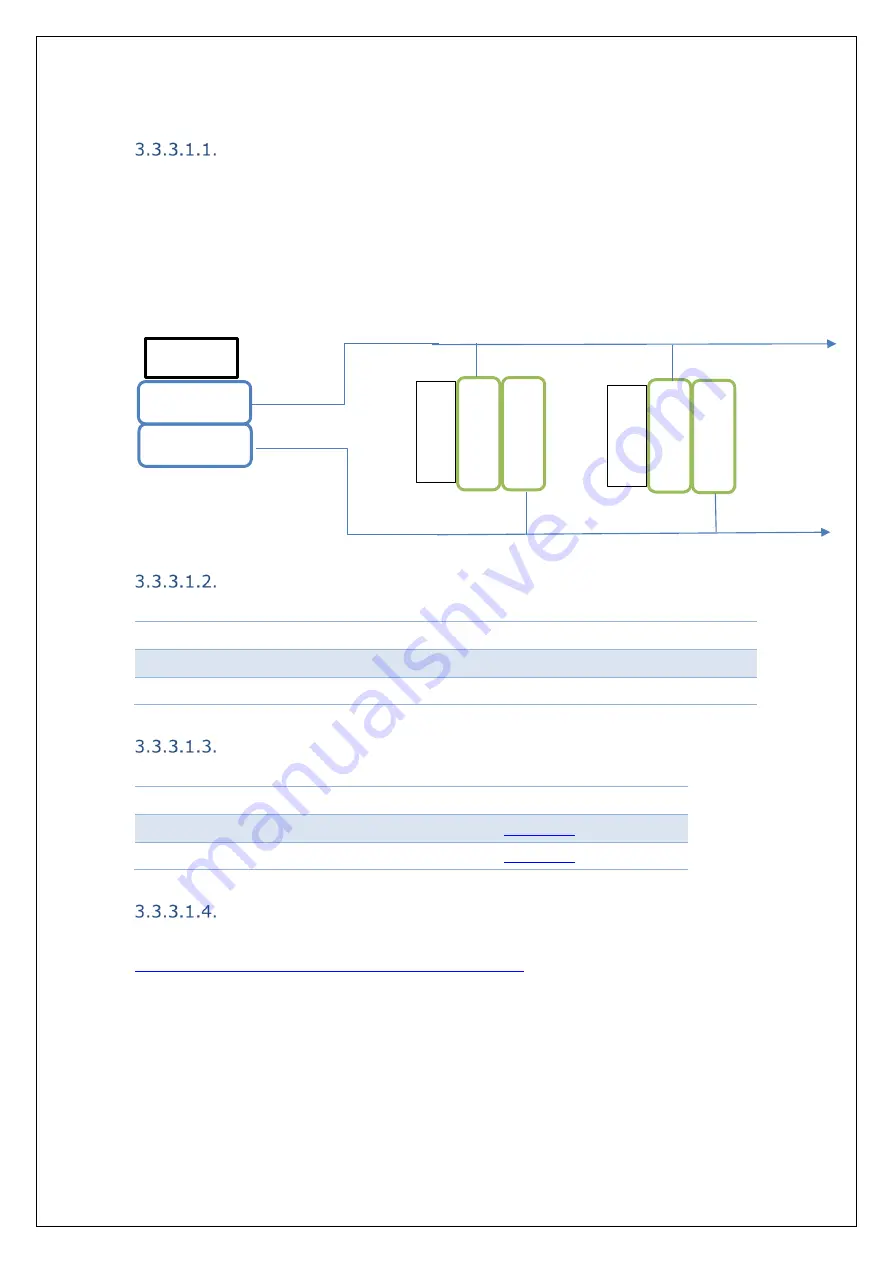
CAN bus (Controller Area Network)
CAN bus Information
2 CAN bus ports for user interface control. The current CAN bus driver is based on FlexCan
which is an embedded network architecture that extends Controller Area Network (CAN). It
provides more deterministic behavior over the CAN network. Its focus is on redundancy at
the hardware level, and time-based prioritized communication at the protocol level.
The connection diagram please refer below (daisy chain):
CAN bus Specification
Name
Value
Bit Rate
up to 1 M Baud
Data Length
0 ~ 8 bytes
CAN bus Device Node
Connector
Device node
Pinout Define Section
JMISC (CAN1)
can0
JMISC (CAN2)
can1
CAN bus Sample Code
http://github.com/embux/Example/tree/master/can_test
CAN_L
CAN_H
ICM-3011
C
A
N
De
vi
ce
C
A
N
De
vi
ce
C
A
N_H
C
A
N_L
C
A
N
_H
C
A
N_H
Summary of Contents for EBC-3A1 Series
Page 9: ...9 ...
Page 10: ...10 Chapter 1 Product Overview This chapter provides background information of EBC 3A1 ...
Page 13: ...13 1 3 Block Diagram ...
Page 24: ...24 2 4 Mechanical Drawing ...
Page 25: ...25 Chapter 3 Software User Guide This chapter details the Linux operation on EBC 3A1 ...
Page 65: ...65 Chapter 5 BSP This chapter introduces how to get board BSP board support package ...





















































