









Getting Started NI ISM-7411/7412/7413 Integrated Steppers
|
© National Instruments
|
9
•
Position
— Specify the target position, in the axis will be driven toward.
•
Velocity
— Specific the maximum velocity of the move in steps/s.
•
Acceleration
— Specify the maximum rate of acceleration when starting the move,
in Units/s
2
.
•
Deceleration
— Specify the maximum rate of deceleration when stopping the move,
in Units/s
2
.
When all the settings are configured, run the VI, and click the
Start Move
button. The motor
should turn according to the configured move. Click the
Stop Move
button to stop the motor,
and the
Stop VI
when you are finished with the project.
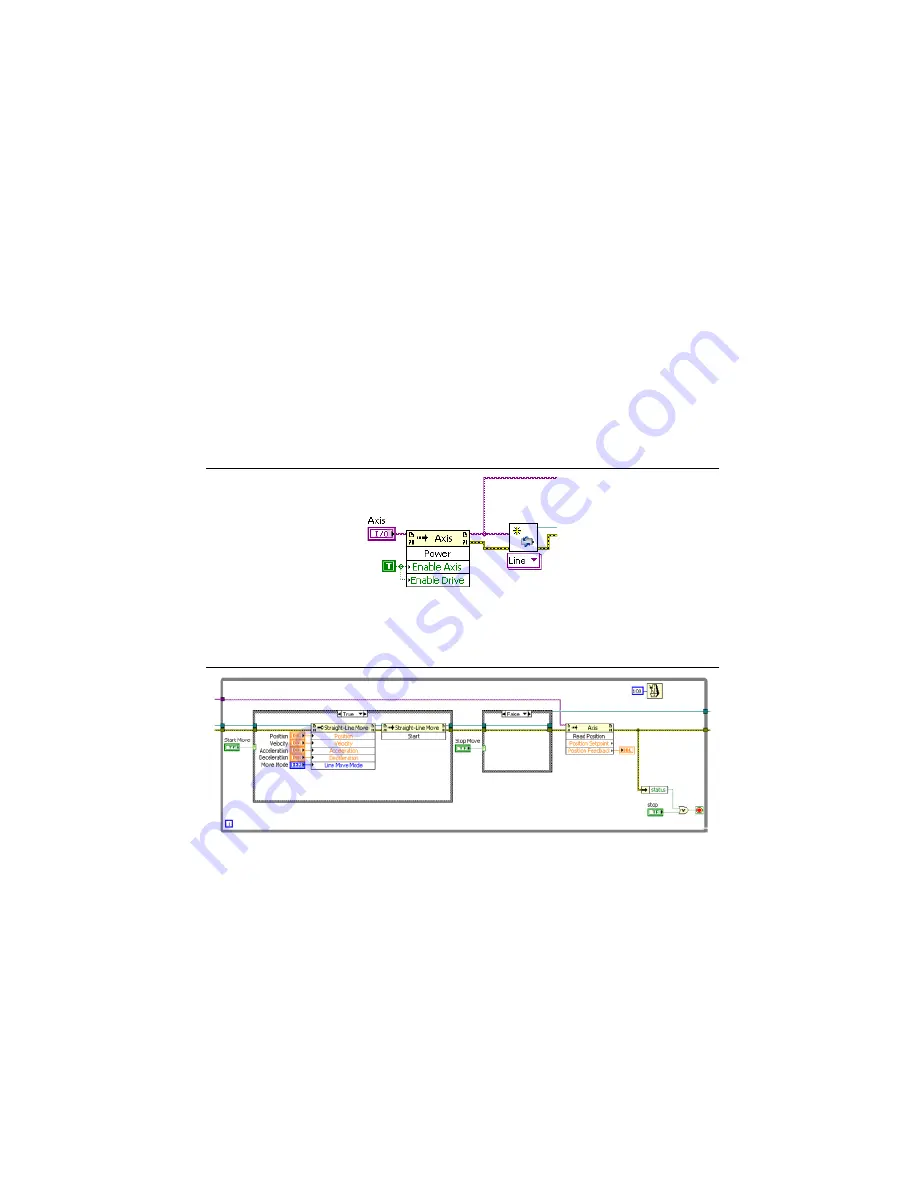
Understanding the Example
The example VI begins by creating a motion resource and using an invoke node to enable the
drive.
Figure 4.
Creating a Motion Resource
When the move is started, all of the configured parameters are written with a property node. The
position feedback is read with an invoke node and displayed.
Figure 5.
Applying the Move Parameters