





























Technical Manual PD4-E-M (EtherCAT)
4 Commissioning
The values are transferred from your EtherCAT master to the controller. After every transfer, the
master should use the status objects of the controller to ensure successful parameterization.
1. Select the Velocity mode by setting object 6060
(Modes Of Operation) to the value "2".
2. Write the desired speed in 6042
.
3. Switch the power state machine to the Operation enabled state, see CiA 402 Power State
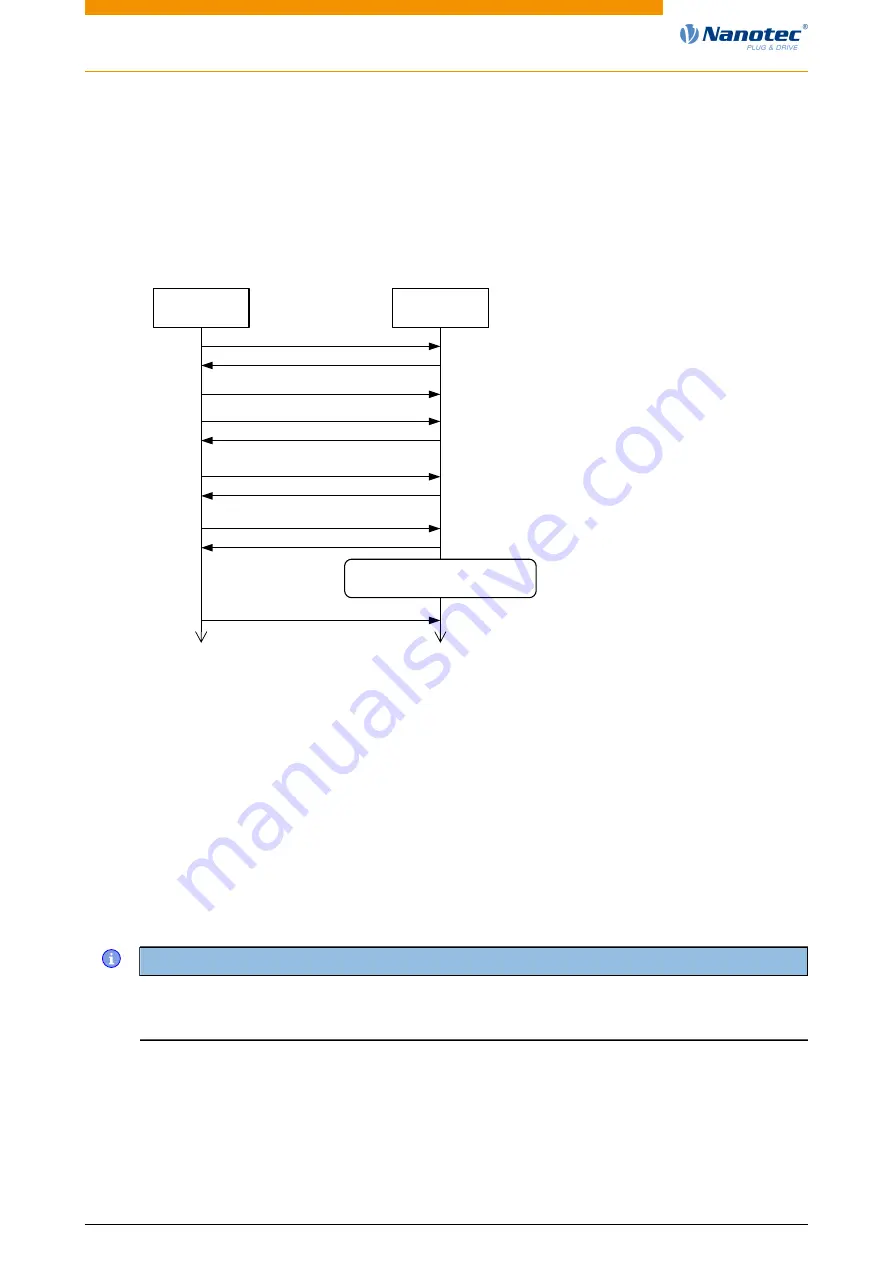
The following sequence starts Velocity mode; the motor turns at 200 rpm.
CAN Master
Controller
write 606
0
h
:00
h
= 02
h
read 606
1
h
:00
h
(= 02
h
?)
write 604
0
h
:00
h
= 0006
h
read 604
1
h
:00
h
(Bit 9, 5 und 0 = 1?)
write 6040
h
:00
h
= 0007
h
read 6041
h
:00
h
(Bit 9, 5, 4, 1, 0 = 1?)
write 6040
h
:00
h
= 000F
h
read 6041
h
:00
h
(Bit 9, 5, 4, 2, 1, 0 = 1?)
The controller is now running
in „Velocity“ mode.
read 6040
h
:00
h
= 0000
h
write 6042
h
:00
h
= 00C8
h
4. To stop the motor, set controlword (6040
) to "0".
4.4 Special drive modes (clock-direction and analog speed)
You have the possibility to control the motor directly via the clock and direction input or the analog input
by activating the special drive modes. These include:
•
•
•
You can also determine the control mode – open loop or closed loop.
Digital input 1 serves here as a release (see Connector X4 - inputs/outputs and external logic
supply).
Note
After activating the special drive modes, the state of the CiA 402 Power State Machine is controlled
only via a digital input (release). State changes that are requested in object 6040
h
(controlword) have
no effect.
4.4.1 Activation
To activate the special drive modes, you must enter the value "2" in 4015
:01
h
h
:02
h
, set the
mode by writing a value between "00"
h
and "0F"
h
.
The following table lists all possible modes and their value for 4015:02
h
:
Version: 1.0.1 / FIR-v1748
28





















































