





























Technical Manual N5 (CANopen)
7 Special functions
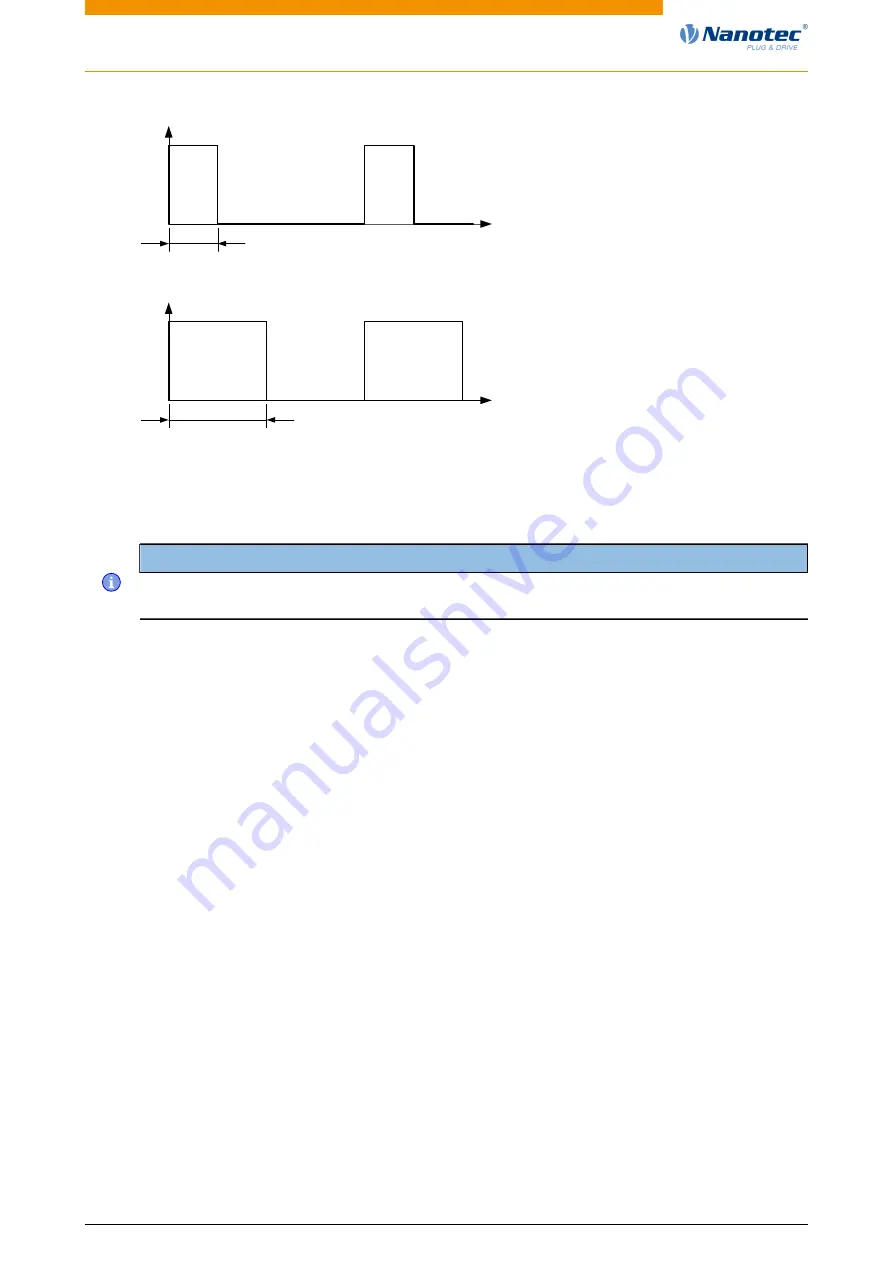
t
2038h:6
t
2038h:6=50
Duty cycle 25%
Duty cycle 50%
v
ol
ta
ge
O
ut
pu
t
v
ol
ta
ge
O
ut
pu
t
=25
7.3 I
2
t Motor overload protection
7.3.1 Description
Note
For stepper motors, only the rated current is specified, not a maximum current. No liability is therefore
assumed when using I
2
t with stepper motors.
The goal of I
2
t motor overload protection is to protect the motor from damage and, at the same time,
operate it normally up to its thermal limit.
This function is only available if the controller is in the closed loop mode (bit 0 of object 3202
must
be set to "1").
There is an exception: If I
2
t is activated in open loop mode, the current is limited to the set rated
current, even if the set maximum current is larger. This function was implemented for safety reasons so
that one can switch from closed loop mode with very high, brief maximum current to open loop mode
without damaging the motor.
7.3.2 Object entries
The following objects affect I
2
t motor overload protection:
•
h
: Peak Current – specifies the maximum current in mA.
•
:1
h
Nominal Current – specifies the rated current in mA.
•
:2
h
Maximum Duration Of Peak Current – specifies the maximum duration of the maximum
current in ms.
The following objects indicate the current state of I
2
t:
•
:3
h
Threshold – specifies the limit in mAs that determines whether the maximum current or
rated current is switched to.
•
:4
h
CalcValue – specifies the calculated value that is compared with the threshold for setting
the current.
•
:5
h
LimitedCurrent – shows the momentary current value that was set by I
2
t.
•
:6
h
Status:
•
Value = "0": I
2
t deactivated
•
Value = "1": I
2
t activated
Version: 2.0.1 / FIR-v1650
96





















































