


























5 Maintenance and Inspection
(5) Origin setting of J5 axis and J6 axis (jig)
Always perform origin setting of the J5 axis and the J6 axis simultaneously. First, set the J5 axis posture.
1) Remove the No.2 arm cover B. The pin hole is
inside the cover.
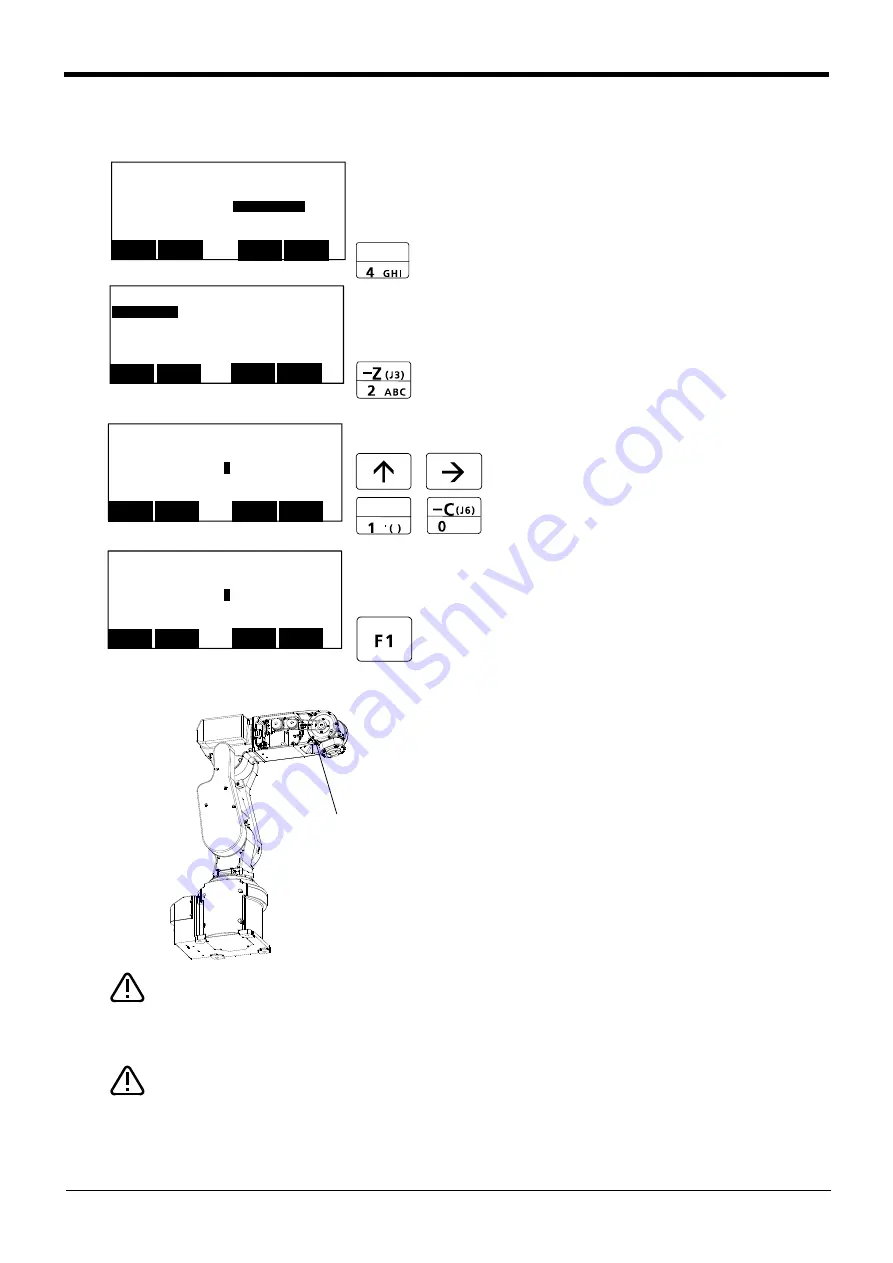
2) Press the [4] key on the menu screen, and
display the Origin/BRK selection screen.
3) Press the [2] key , and display the Brake
release selection screen.
4) Brake release of the J5 axis
Press the [Arrow] key, move the cursor to the
J5 axis and press the [1] key. Set [0] to other
axes.
5) Confirm the axis for which the brakes are to be
released.
6) The one person needs to support the list part
securely with both hands.
7) Pressing the [F1] key is kept with the enabling
switch of T/B pressed down. The brake is
released while pressing the key.
8) Slowly rotate the J5 axis in the direction of plus
90 degree with both hands. Align the pinholes of
the No. 2 arm and wrist housing , feed through
the origin jig (φ6) into the pinholes and fasten.
To ensure safety, the brake-release procedure described below should always be
done by two persons.
Be careful that the robot arm will fall by the self-weight depending on the posture if
the brake is released.
If the [F1] key or the enabling switch of T/B is detached, the brake will work
immediately.
~
SPACE
<BRAKE>
J1:( 0 )J2:( 0 )J3:( 0 )
J4:( 0 )J5:(
1
)J6:( 0 )
J7:( 0 )J8:( 0 )
CLOSE
123
REL.
<MENU>
1.FILE/EDIT 2.RUN
3.PARAM.
4.ORIGIN/BRK
5.SET/INIT. 6.ENHANCED
CLOSE
123
<ORIGIN/BRAKE>
1.ORIGIN
2.BRAKE
CLOSE
123
<BRAKE>
J1:( 0 )J2:( 0 )J3:( 0 )
J4:( 0 )J5:(
0
)J6:( 0 )
J7:( 0 )J8:( 0 )
CLOSE
123
REL.
ピン穴(J5軸)
Pinhole (J5)
CAUTION
CAUTION
Summary of Contents for RV-2F Series
Page 2: ......