



























2-36
Confirming the operation
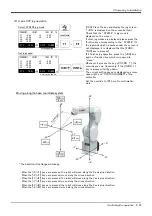
・ When the[+A (J4)] keys are pressed, the J4-axis will rotate in the plus direction.
At this time, to maintain the flange's position, other axes move simultaneously except J5 and J6.
When the[-A (J4)] keys are pressed, rotate in the minus direction.
・ When the[+B (J5)] keys are pressed, the J5-axis will rotate in the plus direction.
At this time, to maintain the flange's position, other axes move simultaneously except J4 and J6.
When the[-B (J5)] keys are pressed, rotate in the minus direction.
・ When the[+C (J6)] keys are pressed, the J6-axis will rotate in the plus direction.
When the[-C (J6)] keys are pressed, rotate in the minus direction.
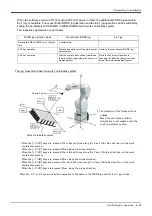
◇◆◇ The flange surface end axis posture cannot be maintained with 3-axis XYZ jog. ◇◆◇
With 3-axis XYZ jog, the flange surface end axis posture (orientation) is not maintained when moving linearly in
the X, Y or Z axis direction.
Use XYZ jog to maintain the posture.
J4軸
+
-
J5軸
-
+
J6軸
+
-
SPACE
,
Changing the flange surface posture
* The wrist pose can be changed maintaining the flange's position.
J6 axis
J5 axis
J4 axis



































































