




























2-26
Confirming the operation
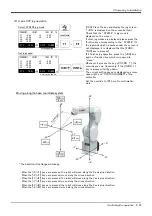
Fig.2-13 : JOINT jog operation
Fig.2-14 : XYZ jog operation
J5軸
J6軸
J3軸
J4軸
+
-
+
-
+
-
J2軸
-
+
-
+
+
-
J1軸
J1 axis
J2 axis
J3 axis
J4 axis
J5 axis
J6 axis
* Each axis moves independently.
+X
+Y
+Z
-Z
-Y
-X
ツ
ー
ル
長
+
+X
+Y
+Z
-
+
-
-
+
制御点
* While maintaining the flange surface posture, the axis moves straight along the base coordinate system.
The robot maintains the flange surface posture.
Also, while maintaining the flange surface position, the flange surface posture changes.
Control point
To
ol
len
gt
h







































































