

























10 OBJECT DICTIONARY
10.4 Object dictionary details (objects in the 6000s)
295
10
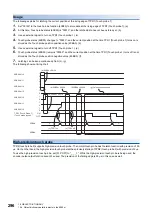
Touch probe (60B8h to 60BBh)
• The touch probe cannot be used in the indexer method.
The current position latch data at the time of TPR1 (Touch probe 1) and TPR2 (Touch probe 2) input can be read.
Object list
When the touch probe function (60B8h) is set, and TPR1 (Touch probe 1) and TRP2 (Touch probe 2), external signals, are
turned on/off, the current position of the rising and falling edges are latched.
The latch status of the current position data can be checked with Touch probe status (60B9h). The latched current data can be
read with Touch probe pos1 pos value (60BAh) and Touch probe pos1 neg value (60BBh). The following shows the touch
probe detection resolution. Enabling the high precision touch probe disables the encoder output pulses. For details of each
object, refer to sections 10.4.9 to 10.4.14.
Index
Sub Index
Name
Data Type
Access
60B8h
0
Touch probe function
U16
rw
60B9h
0
Touch probe status
U16
ro
60BAh
0
Touch probe pos1 pos value
I32
ro
60BBh
0
Touch probe pos1 neg value
I32
ro
60BCh
0
Touch probe pos2 pos value
I32
ro
60BDh
0
Touch probe pos2 neg value
I32
ro
Touch probe1
Touch probe2
Input terminal
TPR1
TPR2
Encoder resolution
[Pr. PD37] = _ _ _ 0 (Selection of high-precision touch probe
is disabled)
55
μ
s
55
μ
s
[Pr. PD37] = _ _ _ 1 (Selection of high-precision touch probe
is enabled)
55
μ
s
Rising edge: 2
μ
s
Falling edge: 55
μ
s






































































