




























90
3 SIGNALS AND WIRING
3.6 Interface
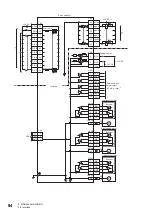
*1 Although the diagram shows the input signal and the output signal each using a separate 24 V DC power supply for illustrative purposes,
the system can be configured to use a single 24 V DC power supply.
*2 The signal cannot be used in the velocity mode and torque mode.
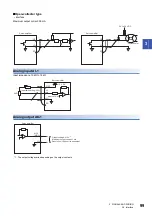
*3 This diagram shows a sink I/O interface. For the source I/O interface, refer to the following.
*4 Refer to "Parts identification" in User's Manual (Introduction) for connecting an external encoder.
*5 This device can be used only on the MR-J5-_G_-RJ_.
*6 If the MR-J5-_G_-RJ_ is used, the device has the same circuit configuration as TPR1 and TPR2. In addition, the touch probe function
can be selected.
*7 Approximately 4.3 k
Ω
for the MR-J5-_G_-RJ_.
Internal connection diagram [A]
Refer to the following for the CN8 connector.
Summary of Contents for MELSERVO-J5 MR-J5-G Series
Page 2: ......
Page 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Page 477: ......







































































