



























248
6 OPTIONS AND PERIPHERAL EQUIPMENT
6.15 Earth-leakage current breaker
6.15
Earth-leakage current breaker
Selection method
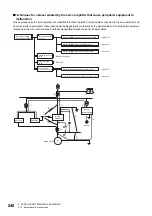
High-frequency chopper currents controlled by pulse width modulation flow in the AC servo circuits. Leakage currents
containing harmonic contents are larger than those of the motor, which runs on AC power.
Select an earth-leakage current breaker according to the following formula, and ground the servo amplifier, servo motor, etc.
securely.
To minimize leakage currents, make the input and output wires as short as possible, and keep a distance of 30 cm or longer
between the wires and ground.
MR-J5-_G_ or MR-J5-_A_
Rated sensitivity current
≥
10 • {Ig1 + Ign + Iga + K • (Ig2 + Igm)} [mA] . . . (6.1)
Ign
Ig1
Iga
Ig2
Igm
M
NV
Cable
Noise filter
Cable
Servo
amplifier
Summary of Contents for MELSERVO-J5 MR-J5-G Series
Page 2: ......
Page 473: ...12 USING A FULLY CLOSED LOOP SYSTEM 12 7 Absolute position detection system 471 12 MEMO ...
Page 477: ......







































































