





























4 STARTUP
4.6 Home position return mode
143
4
4.6
Home position return mode
Before performing the home position return, make sure that the limit switch operates.
Check the home position return direction. An incorrect setting will cause a reverse running.
Check the input polarity of the proximity dog. Otherwise, it may cause an unexpected operation.
In the following cases, make sure that the Z-phase has been passed through once before performing a home
position return. Z-phase unpassed will trigger [AL. 90.5 Z-phase unpassed].
• When using an incremental linear encoder in the linear servo motor control mode
• When using an incremental external encoder in the fully closed loop control mode
• For the use in the DD motor control mode
To execute a home position return securely, start a home position return after moving the linear servo motor to
the opposite stroke end.
Outline of home position return
A home position return is performed to match the command coordinates and the machine coordinates. Under the incremental
method, each power-on of the input power supply requires the home position return. Contrastingly, in the absolute position
detection system, once you have performed the home position return at machine installation, the current position will be
retained even if the power supply is shut off. Therefore, the home position return is unnecessary when the power supply is
switched on again.
This section shows the home position return types of the servo amplifier. Select the optimum method according to the
configuration and uses of the machine.
When a home position return is started with the controller, Controlword bit 4 will turn on. For details of the home position
return, refer to the controller instruction manual.
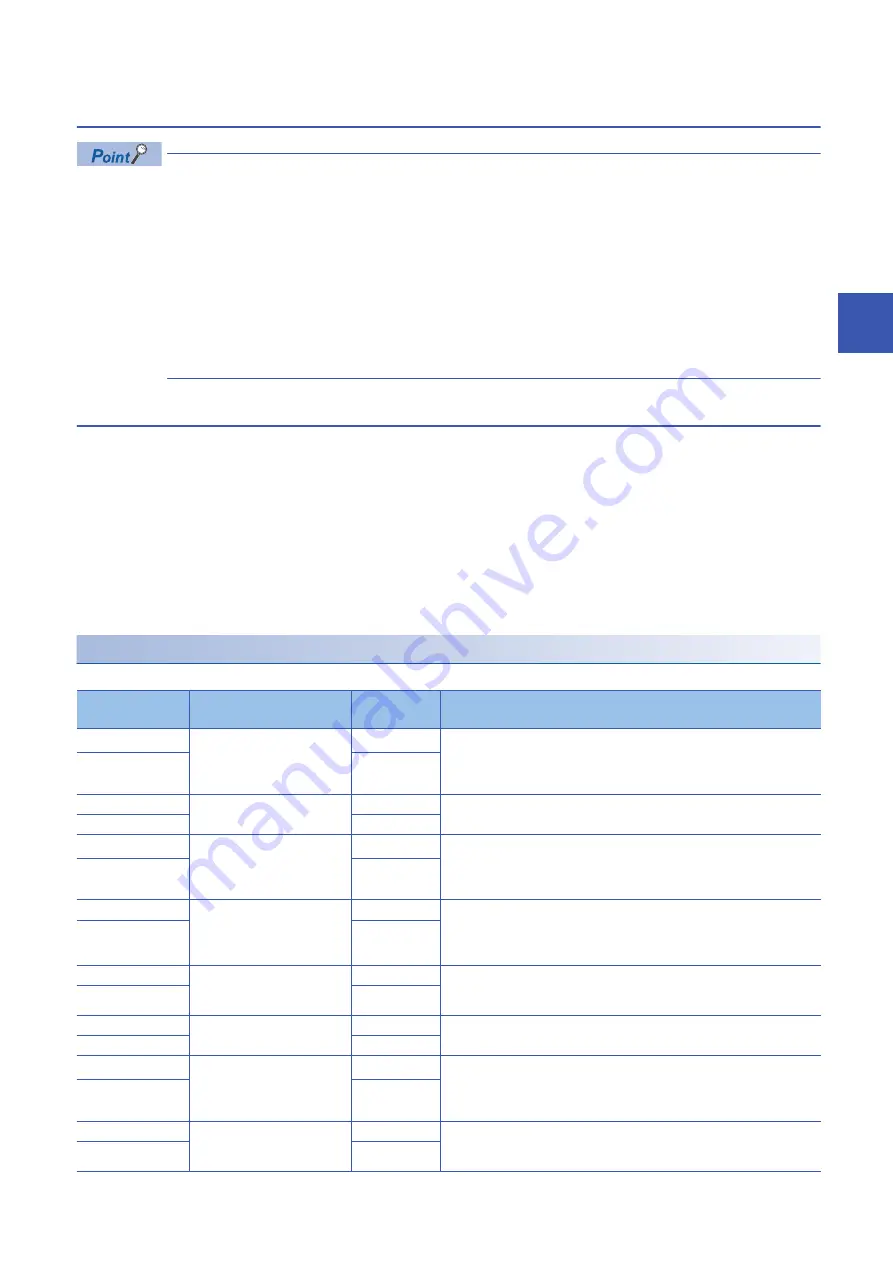
Home position return types
Select the optimum home position return type according to the machine type or others.
Method No.
Home position return type Rotation
direction
Description
-1
Dog type
(Rear end detection, Z-phase
reference)
Forward rotation
Deceleration starts at the front end of the proximity dog. After the rear end is
passed, the position specified by the first Z-phase signal, or the position of the
first Z-phase signal shifted by the specified home position shift distance is used
as the home position.
-33
Reverse rotation
-4
Stopper type
(Stopper position reference)
Forward rotation
A workpiece is pressed against a mechanical stopper, and the position where it
is stopped is set as the home position.
-36
Reverse rotation
-2
Count type
(Front end detection, Z-phase
reference)
Forward rotation
At the front end of the proximity dog, deceleration starts. After the front end is
passed, the position specified by the first Z-phase signal after the set distance
or the position of the Z-phase signal shifted by the set home position shift
distance is set as a home position.
-34
Reverse rotation
-6
Dog type
(Rear end detection, rear end
reference)
Forward rotation
Deceleration starts from the front end of the proximity dog. After the rear end is
passed, the position is shifted by the travel distance after proximity dog and the
home position shift distance. The position after the shifts is set as the home
position.
-38
Reverse rotation
-7
Count type
(Front end detection, front end
reference)
Forward rotation
Deceleration starts from the front end of the proximity dog. The position is
shifted by the travel distance after proximity dog and the home position shift
distance. The position after the shifts is set as the home position.
-39
Reverse rotation
-8
Dog cradle type
Forward rotation
A position, which is specified by the first Z-phase signal after the front end of the
proximity dog is detected, is set as the home position.
-40
Reverse rotation
-9
Dog type last Z-phase reference
Forward rotation
After the front end of the proximity dog is detected, the position is shifted away
from the proximity dog in the reverse direction. Then, the position specified by
the first Z-phase signal or the position of the first Z-phase signal shifted by the
home position shift distance is used as the home position.
-41
Reverse rotation
-10
Dog type front end reference
Forward rotation
Starting from the front end of the proximity dog, the position is shifted by the
travel distance after proximity dog and the home position shift distance. The
position after the shifts is set as the home position.
-42
Reverse rotation
Summary of Contents for MELSERVO-J4 series
Page 2: ......
Page 605: ...APPX Appendix 6 EC declaration of conformity 603 A ...
Page 638: ...636 APPX Appendix 14 Encoder output pulse setting method MEMO ...
Page 645: ......







































































