





























29
CHAPTER 1 PRODUCT OUTLINE
1
1.
1 Pos
itioning
Con
trol
1.1.4
Outline design of positioning system
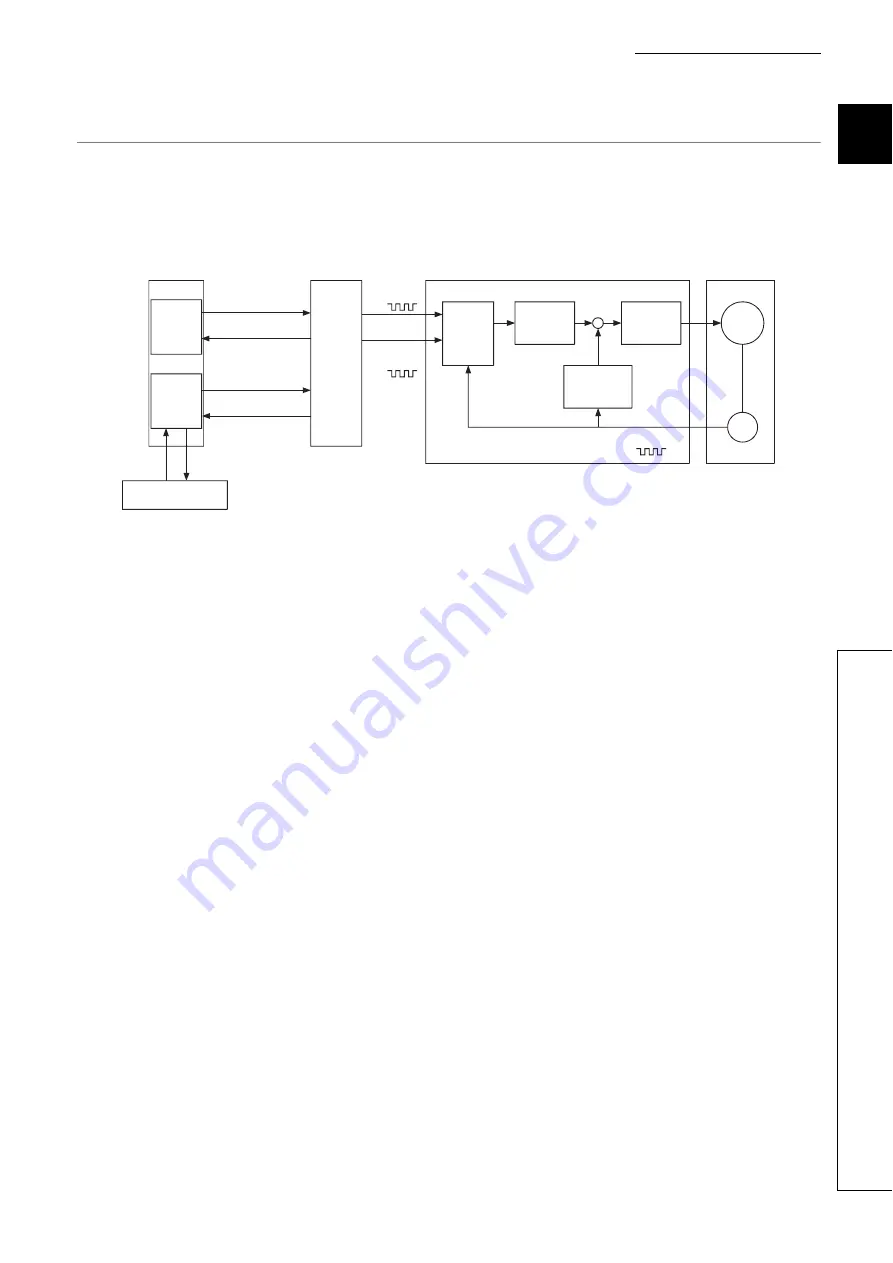
The outline of the positioning system operation and design, using the LD75, is shown below.
(1) Positioning system using LD75
(a) Positioning operation by the LD75
1.
The LD75 output is a pulse train.
The pulse train output by the LD75 is counted by and stored in the deviation counter in the drive unit.
The D/A converter outputs an analog DC current proportionate to the count maintained by the deviation
counter (called "pulse droop"). The analog DC current serves as the servomotor speed control signal.
2.
The motor rotation is controlled by the speed control signal from the drive unit.
As the motor rotates, the pulse encoder (PLG) attached to the motor generates feedback pulses, the
frequency of which is proportionate to the rotation speed.
The feedback pulses are fed back to the drive unit and decrements the pulse droop, the pulse count
maintained by the deviation counter.
The motor keeps on rotating as the pulse droop is maintained at a certain level.
3.
When the LD75 terminates the output of a pulse train, the motor decelerates as the pulse droop
decreases and stops when the count drops to zero.
Thus, the motor rotation speed is proportionate to the pulse frequency, while the overall motor rotation
angle is proportionate to the total number of pulses output by the LD75.
Therefore, when a movement amount per pulse is given, the overall movement amount can be
determined by the number of pulses in the pulse train.
The pulse frequency, on the other hand, determines the motor rotation speed (feed speed).
Drive unit
Servomotor
Program
Forward run
pulse train
Reverse run
pulse train
Speed
command
Servo
amplifier
Interface
M
PLG
Feedback pulse
GX Works2
CPU module
Peripheral
devices
interface
Read, write, etc.
Read, write, etc.
Read, write, etc.
Positioning module
LD75
Setting
data
Deviation
counter
D/A
converter
Summary of Contents for MELSEC-L LD75D
Page 2: ......
Page 11: ...9 Memo ...
Page 176: ...174 ...
Page 264: ...262 ...
Page 266: ...264 ...
Page 267: ...265 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 268: ...266 ...
Page 269: ...267 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 270: ...268 ...
Page 271: ...269 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 272: ...270 Z ABRST1 instruction execution ...
Page 273: ...271 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 278: ...276 ...
Page 279: ...277 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 280: ...278 ...
Page 281: ...279 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 282: ...280 ...
Page 283: ...281 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 284: ...282 ...
Page 285: ...283 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 286: ...284 ...
Page 287: ...285 CHAPTER 6 PROGRAM USED FOR POSITIONING CONTROL 6 6 4 Positioning Program Examples ...
Page 316: ...314 Memo ...
Page 685: ...683 APPENDICES A Appendix 1 Function Update Appendix 1 1 Function comparison Memo ...
Page 738: ...736 Memo ...
Page 817: ......





















































