





























5-490
About the communication setting (Ethernet)
5Functions set with parameters
(4) CRRCE11 to 19 (protocol)
When using the data link function, the setup is necessary.
Sets the protocol (procedure) for communication. The protocol has three kinds of no-procedure, procedure
and data link.
0... No-procedure: The protocol is applied to use the personal computer Support Software .
1... Procedure: Reserved. (Since it is not any function, don't set it by mistake.)
2... Data link: The protocol is used to use OPEN/INPUT/PRINT commands for communication.
(5) COMDEV (Definition of devices corresponding to COM1: to 8)
When using the data link function, the setup is necessary.
Definition of device corresponding to COM1: to 8 is set. COM1: to 8 is used for OPEN command of the robot
program.
Be sure to set it only when the data link is specified on setting of the protocol (CPRCE11 to 19).
The setting values of the Ethernet interface option correspond to the port Nos. which are set at the parame-
ter NETPORT.
* In the following parameters NETOPORT (n) and COMDEV(n), n indicates the element No. of that parame-
ter.
For example, if the port No. specified at NETPORT(4) is allocated to the data link of COM:3, the following
will be applied.
COMDEV(3) = OPT13
* OPT13 is set at 3rd element of COMDEV.
CPRCE13 = 2
* Set up as a data link.
(6) NETMODE (server specification).
Set up, when using the data link function.
Set the TCP/IP communication in the data link function of the robot controller as the server or the client.
It is necessary to change with the application of the equipment connected to the robot controller.
This function corresponds to the software version H7 or later.
In the version older than H7, the robot controller operates only as a server.
(7) NETHSTIP (The IP address of the server of the data communication point).
Set up, when using the robot controller as a client by the data link function.
Specify the IP address of the partner server which the robot controller connects by the data link function.
Set up, when only set the robot controller to the client by server specification of NETMODE.
(8) MXTTOUT (Timeout setting for executing real-time external control command)
This is changed when using real-time external control command and setting the timeout time for communi-
cation with the robot controller.
Set a multiple of the approx. 7.11msec control cycle.
When the real-time external control command is executed, the timeout time during which no communication
data is received by the robot controller from the personal computer is counted up. If the count reaches the
value set in MXTTOUT, the operation will stop with the error (#7820). For example, to generate an error
when there is no communication for approx. 7 seconds, set 1000.
This setting is set to -1 (timeout disabled) as the default.
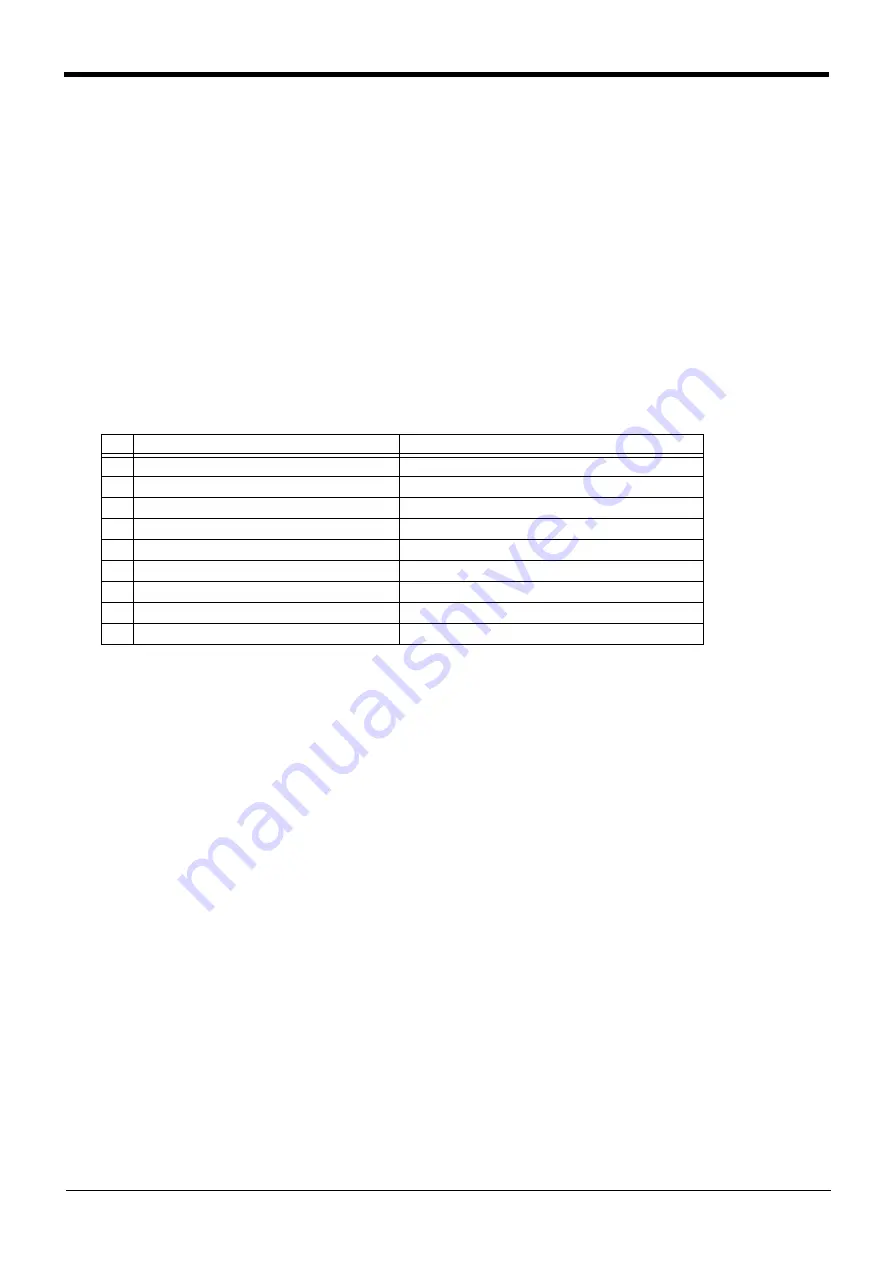
n
The device name set up by COMDEV(n)
Port number
1
OPT11
The port number specified by NETPORT(2)
2
OPT12
The port number specified by NETPORT(3)
3
OPT13
The port number specified by NETPORT(4)
4
OPT14
The port number specified by NETPORT(5)
5
OPT15
The port number specified by NETPORT(6)
6
OPT16
The port number specified by NETPORT(7)
7
OPT17
The port number specified by NETPORT(8)
8
OPT18
The port number specified by NETPORT(9)
9
OPT19
The port number specified by NETPORT(10)





















































