





























9-96
9-96
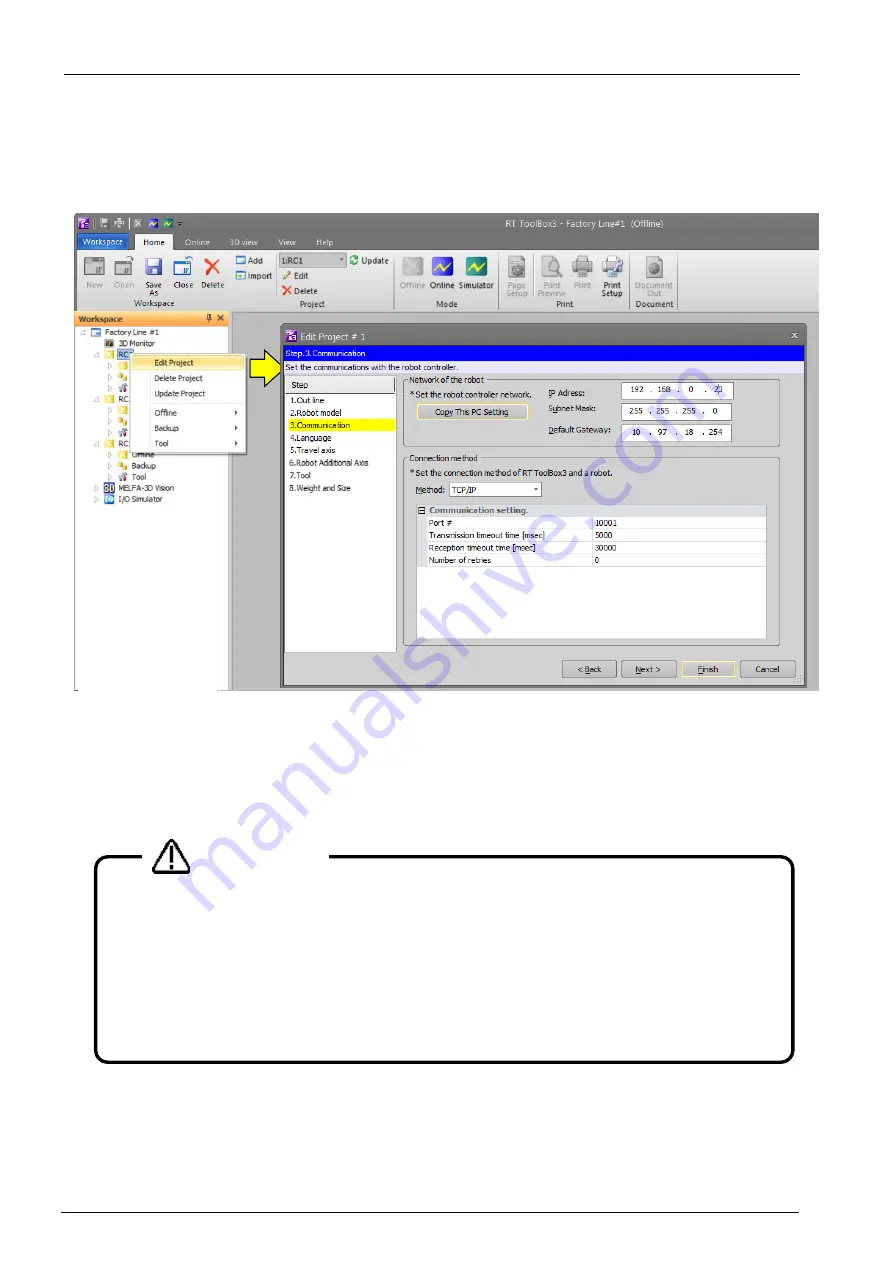
9.2. Connection Settings
Click the name of the project to display the project tree for with the right button of the mouse, then from the right
button menu, click [Edit Project]. The project edit screen is displayed. Set connection settings in the "Step 3.
Communication" page of the Edit Project screen.
Figure 9-1 Connection Settings
Select the communication method, and set the details for each communication method in the [Communication] field.
After setting the details, click the [Finish] button.
The content of the detailed settings for each communication method is explained from the following section
onwards.
Do not connect from multiple projects to 1 controller at the same
time.
Do not connect from multiple projects to 1 controller at the same time.
The same data may be referred to, and the data not read correctly.
Do not connect USB to multiple controllers from 1 computer.
When using USB connection, 1 computer can connect to only 1 robot controller. It is also not
possible to connect to multiple controllers using the USB hub.
Caution
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...