





























14-303
14-303
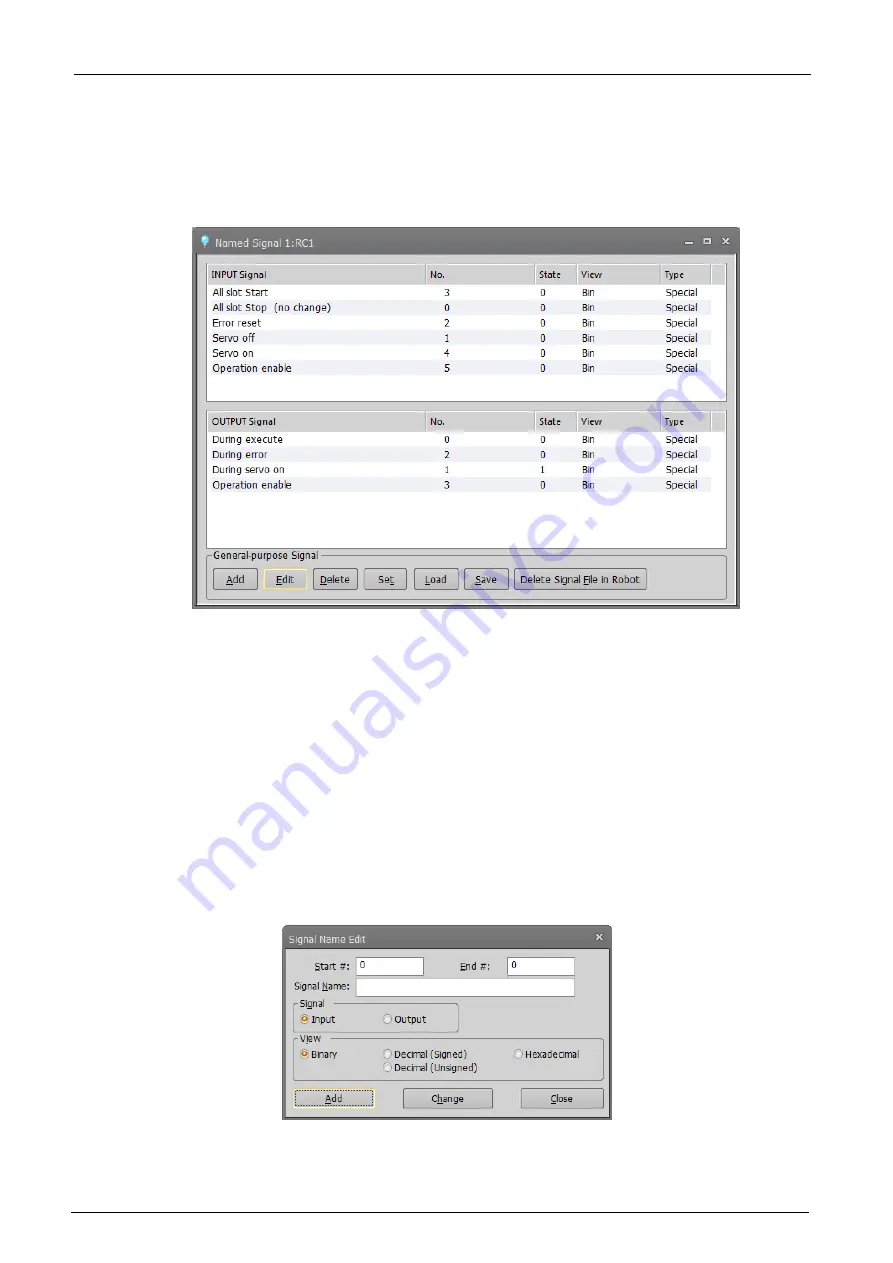
14.3.2. Named signals
You can give names to general input/output signals and check their statuses.
With "Named signals", you can check the status of dedicated input/output signals and named general
input/output signals. When starting up, you can load a definition file for named signals in the robot controller.
From the project tree, double click the target project [Online] -> [Monitor] -> [Signal Monitor] -> [Named Signals].
Figure 14-31 Named Signal
[Add]
: This registers a new general input/output signal name.
[Edit]
: This changes the setting for an existing general input/output signal selected in
the list.
[Delete]
: This deletes a signal selected in the list.
[Input/Output]
: This input pseudo input or output forced output in the list.
[Load]
: This loads a file defining named signals saved in the robot controller and in the
computer.
[Save]
: This saves the information on the set named signals to the robot controller or
computer.
[Delete signal
file in robot]
: This deletes the named signal information in the robot controller.
14.3.2.1. Adding new named signal or revising one
To add a new named signal, click the [Add] button. To revise one, select the signal to be revised from the list
and click the [Edit] button.
Figure 14-32 Signal Name Editing
Input the general signal numbers and names, and select the signal type and display method, then when adding a
new named signal, click the [Add] button. The set signal is added to the list.
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...