





























13-221
13-221
13.3.3.5. Erectric hand point parameter
You can teach
multi-function
electric hand
.
Parameter settings are used while connected to the robot controller.
From the project tree, you double-click [Movement Parameter] -> [Hand] -> [Electric Hand Point] under
[Parameter] item to be edited.
The robot controllers that can set the multi-function
electric hand parameter
are as follows.
Table 13-4 The controller that can use parameters about electric hand
Robot controller
Software version of robot controller
CR800-D/CR800-R/CR800-Q
All versions
CR750-D/CRnD-700
Ver.S2a or later
CR750-Q/CRnQ-700
Ver.R2a or later
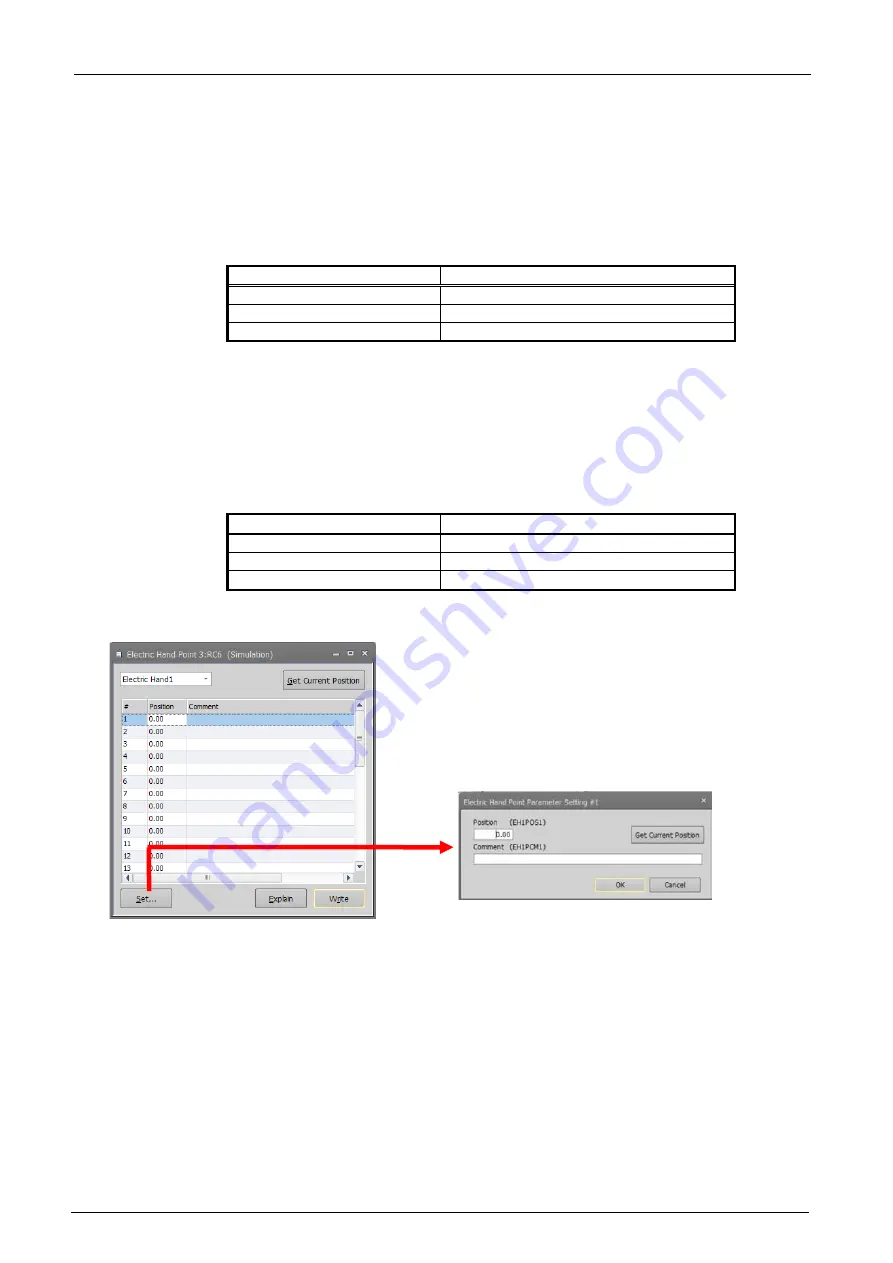
When you click [Get Current Position] button, you can set electric hand position to currently selected position
number.
After you select point list, click [Set…] button. “Electric Hand Point Parameter Setting” screen is displayed. When
you set position value and comments in this screen, click [OK] button. Point list of electric hand point screen is
updated. You can also edit the parameters directly from the list.
The robot controllers that can set comments are
as follows.
Table 13-5 The controller that can use parameters about electric hand point comment
Robot controller
Software version of robot controller
CR800-D/CR800-R/CR800-Q
All versions
CR750-D/CRnD-700
Ver.S3e or later
CR750-Q/CRnQ-700
Ver.R3e or later
After changing the parameter value, you click the [Write] button to write the parameters to the robot controller.
Figure 13-19 Electric hand point parameter
You can refer to the explanation of the displayed parameter with the [Explain] button.
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...