




























11-163
11-163
11.8. Position jump
It is possible to move the robot to a registered position variable with a specified interpolation movement.
This function is available when the program is being edited in the online or simulation mode.
The pair of robot model and robot controller software version that this function can use is as follows.
However when
the program is in the simulation/debug state, you can use this function regardless of the following.
Table 11-6 Robot model and robot controller software version that this function can use
No.
Robot model
CR800
CR750/700
CRn-500
1
Vertical type(6 axis)
All version
Ver.R3e/S3e or
later
Cannot be used
2
Vertical type(5 axis)
Cannot be used
Cannot be used
3
Horizontal type(4 axis)
All version
Ver.R3e/S3e or
later
However, this function cannot be used with the variable of work coordinate type.
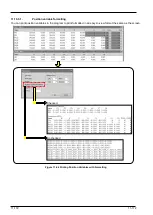
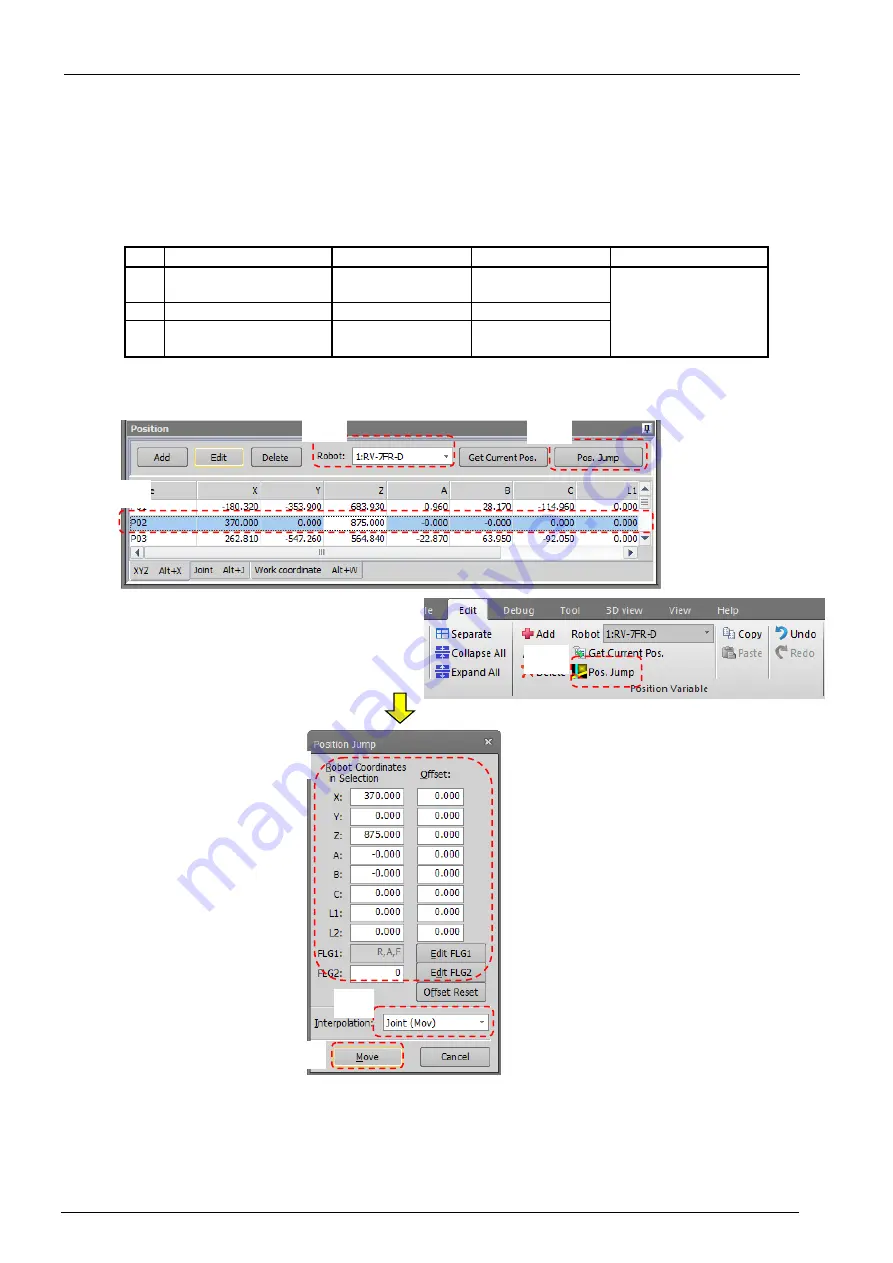
Figure 11-60 Position jump
The operation of "Position jump" function is as follows.
(1) Select the robot. (In case of multiple robots)
(2) Select a position variable to move.
(3) Click the [Pos. Jump] button on the program edit screen or click the [Pos. Jump] button in the [Edit] tab ->
(3)
(4)
(5)
(6)
(1)
(2)
(3)
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...