





























11-146
11-146
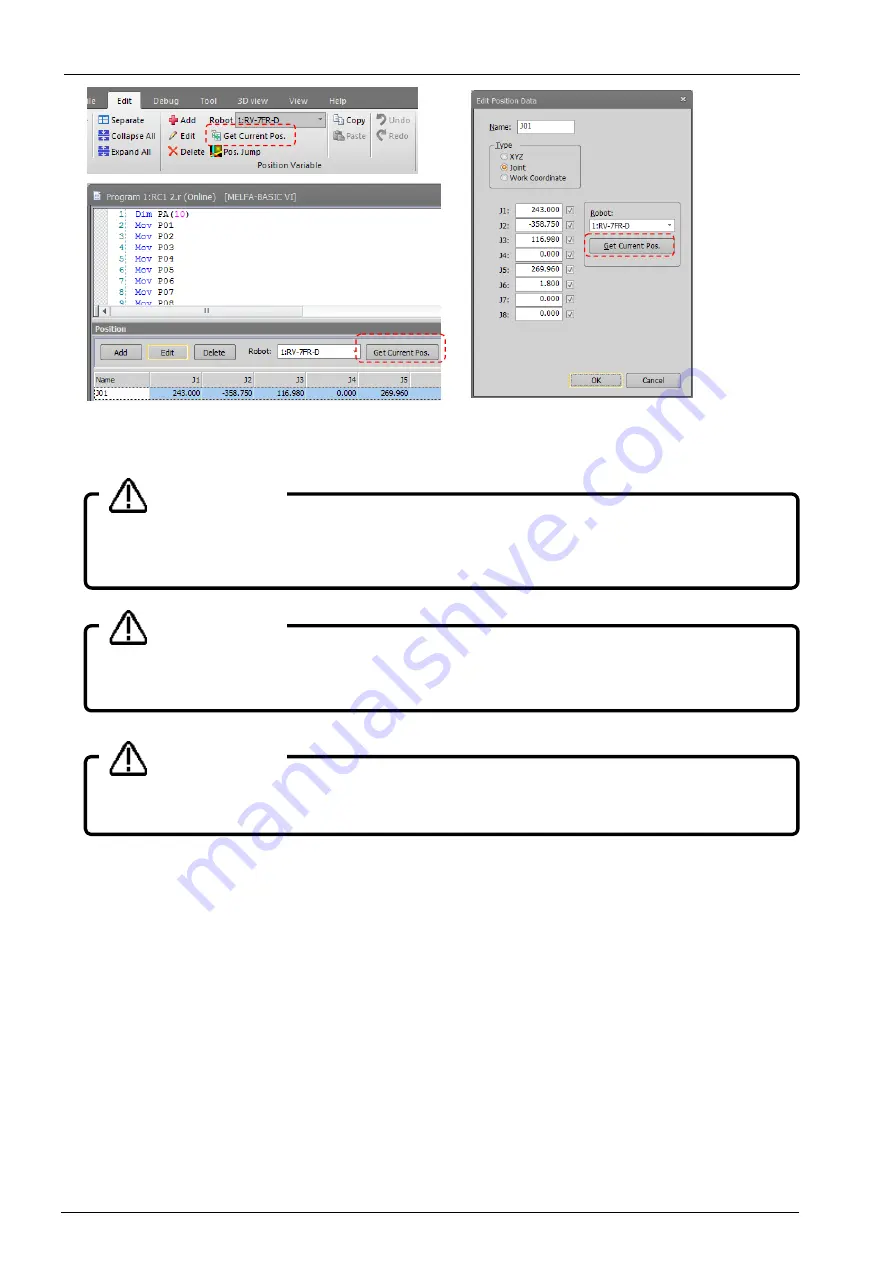
Figure 11-38 Getting the Current Position
11.7.3.2. Deleting position variables
Select the target position variable and then click the [Delete] button on the program edit screen or click the [Delete]
button in the [Edit] tab-[Position Variable] group from the ribbon. The selected position variable is deleted. You can
also delete multiple position variables at the same time. You can select multiple position variables by clicking
position variables while holding down the [Ctrl] key or the [Shift] key on the keyboard. However, you cannot select
XYZ position variables and joint position variables at the same time. However, it is not possible to delete two or more
types of position variables, joint variables and work coordinate variables at the same time.
To add a position array variable, specify the array name and element number in the variable name.
Also, when writing to a robot, be sure to write the Dim declaration in the statement. If there is no Dim
declaration, an error will occur in writing to the robot controller.
Caution
The unit of the element to be used differs for each robot used. Please refer to the operation manual
of individual robot.
Caution
If you acquire the current position from a robot of a different model, you will get different position
data from the assumed position, so be careful.
Caution
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...






































































