






















1.0
SPYDER-PLUS-S1 BASIC SETUP
www.maxcessintl.com
MAGPOWR Spyder-Plus-S1 Tension Control
MI 850A351 1 C
Page 8 of 68
1.2
DANCER
This page provides a summary of the basic set-up and calibration of the Spyder control in
Dancer
mode. Additional
features and options of the Spyder control are described later in this manual.
Refer to either the
Dancer, Torque
or the
Dancer, Speed
screen flowcharts drawing number 850B352 for a
navigation aid.
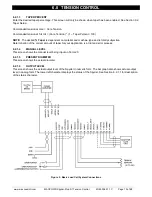
1. Required connections for the basic Spyder system are:
24 VDC power (Term.6 and Term.7)
Earth ground (Term. 8)
Dancer position signal (Term.38, Term.39 and Term.26, see Sections 7.3 and 7.4 and Figures 11 and
12 for connections.)
Dancer setpoint signal (Term. 15 through Term.17)
RUN/STOP using the Spyder internal logic supply between Term.9 and Term.11 (this is typically
accomplished by using a switch between these terminals)
E-Stop jumper in place between Term.10 and Term.11. (This is supplied by default from the factory)
Analog control output to clutch or brake amplifier, current-to-pressure transducer, motor controller, etc.
(Term.30 to Term.31, refer to Sections 5.1 and 5.3 for output configuration). The Spyder inputs and
outputs are referenced to Earth ground and the negative of the 24 VDC power.
See Sections 2.0, 7.0 and Figure 11 for specific wiring requirements.
2. When using a power amplifier, set the current range jumper to the proper setting for the clutch or brake being
used. (Refer to amplifier and clutch or brake user manuals for proper settings.) The following is also required:
Power amplifier input (if used), 115 VAC for PS-90 or 24 VAC or 24 VDC for PS-24
Output from power amplifier to clutch or brake
The Spyder output is referenced to Earth ground and the negative of the 24 VDC power.
3. Close the RUN/STOP circuit (Term.9 and Term.11) to put the Spyder into HOLD mode (see Section 5.2.1).
4. Using the Configure menu select
Control Type = Dancer, Torque
if a clutch or brake is being controlled or
Control Type = Dancer, Speed
if a motor is being controlled. In the Configuration menu also select if
integrator control will be used and select the appropriate system type. For large roll builds to use the gain
compensated dancer control select
Diameter Used
to
YES
. See Section 7.2.2 for the Configure menu.
5. If using the diameter input connect a 0-10V signal proportional to diameter to Term.35 and 36. See section
5.4.4. The diameter input voltage should be zero diameter at zero volts. See section 8.3 for calibrating
diameter.
6. Using the Configure menu select
Setpoint Source = ANALOG
if the dancer setpoint will be read from the
analog voltage on terminal 16. Selecting
Setpoint Source = ETHERNET
will use a software setpoint position
which can be changed either through the Setpoint Position screen, or the Web page, or Modbus/TCP.
7. Calibrate the dancer input and the setpoint position input (refer to Sections 7.3 and 7.4). The setpoint position
input does not need to be calibrated if
Setpoint Source = ETHERNET
.
8. Turn tension on by opening the TENSION ON/OFF circuit (Term.13 and Term.11), and put the Spyder in RUN
mode by switching open the RUN/STOP circuit. Adjust the position setpoint using a potentiometer (Term. 15
through Term.17). Run the machine at a reduced line speed and observe the system.
9. If the system is unstable, go to the
Quick Stabilize
menu (Section 7.5.1) and press the
(down arrow) to
begin stabilizing. Use the
(left arrow) and
(
right arrow) in the following screens to tune the system. When
using the gain compensated dancer go to the Tuning Menu (Section 7.6). If using the gain compensated dancer
feature (Dancer, Torque with Diameter) go to the Tuning menu (Section 7.6).
10. For tuning methods that will optimize responsiveness, refer to Section 7.5.2 (Dancer, Torque, no Diameter and
Dancer, Speed with or without Diameter) or Section 7.6 (Dancer, Torque, with Diameter).
11. Basic set-up is complete. Additional features and options are described later in this manual. Always use the
RUN/STOP feature to put the Spyder into HOLD mode whenever the machine is stopped to avoid a possible
high-tension condition during start-up. For Dancer, Torque use the Hold Level screen to output a value of
torque to prevent the dancer arm from moving during Hold.
Summary of Contents for MAGPOWR Spyder-Plus-S1
Page 2: ......