









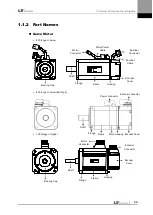













1. Product Components and Signals
1-7
1.2
System Configuration
1.2.1
Overview
The L7 servo system can be configured in various ways depending on its interface with the
upper level controller.
(1)
Position Operation System
The servo is run by pulse commands. You can change the location of the servo motor by
changing command pulses based on a certain transfer unit.
Position
Controller
Speed
Controller
Change
Position
Command
Pulse
Position
Controller
Speed
Controller
Current
Controller
Position Controller
Upper Level Controller
Servo Drive
Servo Motor
Motor
Encoder
Position Feedback
Advantage: The structure of the upper level controller is simple because pulse input is linked to
transfer units.
Disadvantages:
Fast rotation is compromised when a precise transfer unit is used.
Response is low because multiple levels of controllers are used.
(2)
Speed Operation System
The servo is run by speed commands. There are two types of speed commands: analog
voltage command and digital speed command.
Position
Controller
Speed
Controller
Change
Speed
Command
Speed
Controller
Current
Controller
Speed Command
Upper Level Controller
Servo Drive
Servo Motor
Motor
Encoder
Position Feedback
Advantages:
The servo responds quickly.
Precision control is easy.
Disadvantage: The upper level controller is complex.
Summary of Contents for L7 A001
Page 1: ...VER 1 5...
Page 2: ......
Page 32: ...1 Product Components and Signals 1 20...
Page 38: ...2 Installation 2 6...
Page 54: ......
Page 188: ...7 Product Specifications 7 26 L7 A020 L7 A035 Weight 2 5 kg cooling fan included...
Page 210: ...8 Maintenance and Inspection 8 14...
Page 211: ...9 Appendix 9 1 9 Appendix...
Page 218: ...9 Appendix 9 8...
Page 221: ......
Page 222: ......







































































