





























5
Motor control (MCTRL)
5.4
V/f characteristic control (VFCplus)
174
Lenze · 8400 HighLine · Reference manual · DMS 12.0 EN · 06/2017 · TD23
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.4.4
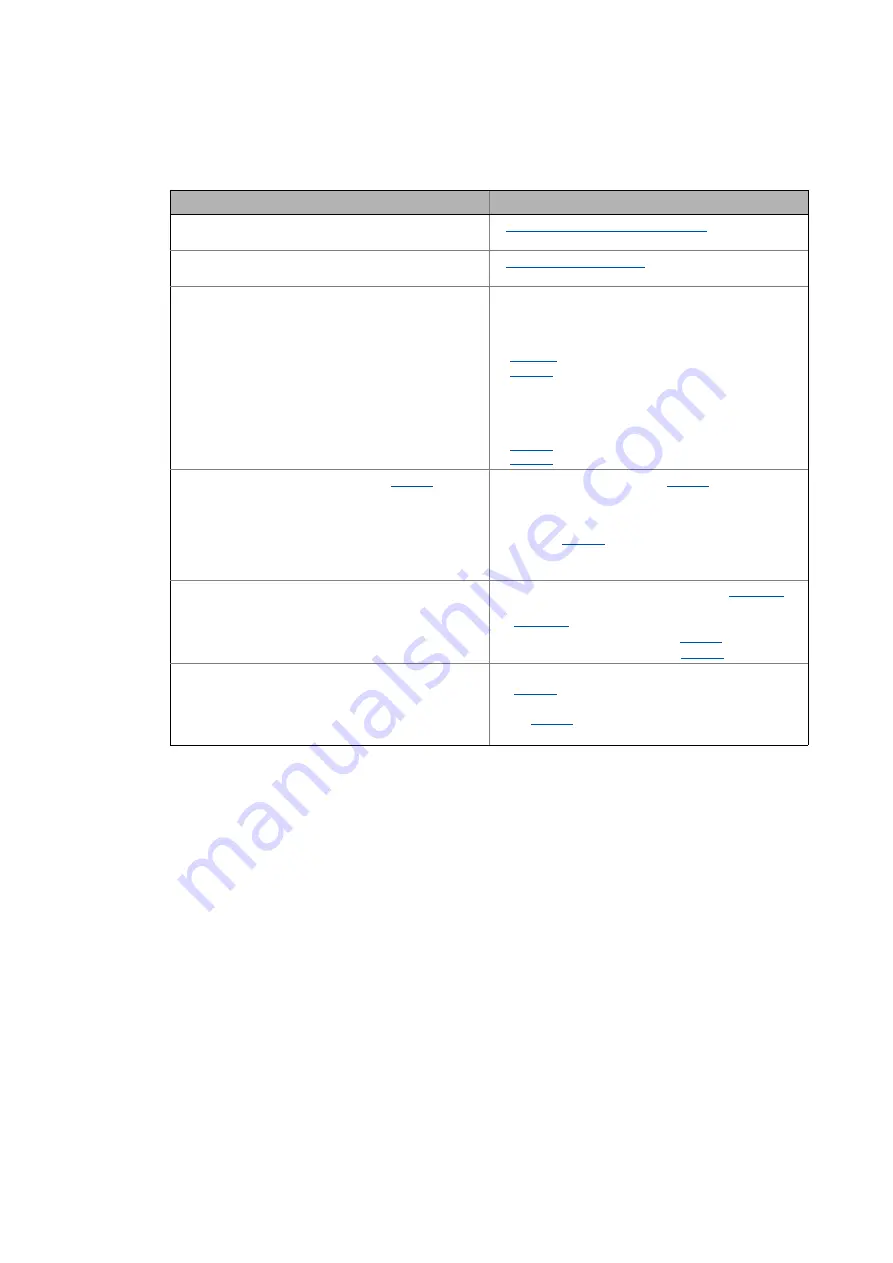
Remedies for undesired drive behaviour
Drive behaviour
Remedy
Inadequate smooth running at low speeds, especially in
the case of operation with a long motor cable
Automatic motor data identification (
Problems in case of high starting duty (great mass
inertia)
Drive does not follow the speed setpoint.
The current controller intervenes in the set field
frequency to limit the controller output current to the
maximum current (C0022, C0023). Therefore:
• Prolong acceleration/deceleration times:
Accel. time - main setpoint
• Consider a sufficient magnetising time of the motor.
Depending on the motor power, the magnetising
time amounts to 0.1 ... 0.2 s.
• Increase the maximally permissible current:
: Imax in motor mode
: Imax in generator mode)
For operation without speed feedback (
= 6):
Insufficient speed constancy at high load (setpoint and
motor speed are not proportional anymore)
• Increase slip compensation (
).
Important: Unstable drive due to overcompensation!
• With cyclic load impulses (e. g. centrifugal pump), a
smooth motor characteristic is achieved by smaller
values in
(possibly negative values).
Note: The slip compensation is only active for operation
without speed feedback.
"Clamp operation active" error message (oC11):
Inverter cannot follow dynamic processes, i.e. too short
acceleration/deceleration times in terms of load ratios.
• Increase the gain of the I
max
controller (
• Reduce the reset time of the I
max
controller
)
• Prolong the acceleration time (
)
• Prolong the deceleration time (
Motor stalling in the field weakening range
(adaptation especially required for small machines)
• Reduce the override point of field weakening
• If motor power < inverter power:
Set
to I
max
= 2 I
rated motor
• Reduce dynamic performance of setpoint generation